
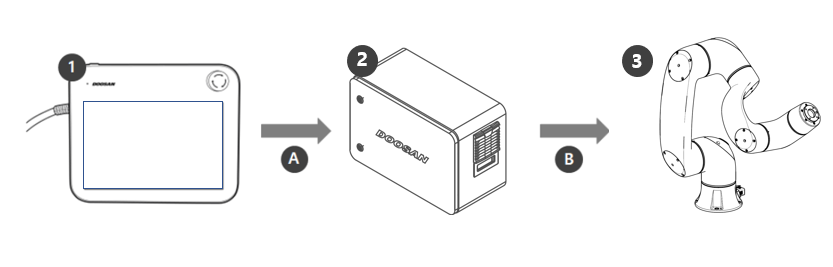
Configuration du système
| Non | Nom | Description |
|---|---|---|
| 1 | Poignée de commande d'apprentissage | Ce dispositif gère l'ensemble du système et est capable d'enseigner des poses spécifiques au robot ou de faire des réglages liés aux manipulateurs et aux contrôleurs. |
| 2 | Contrôleur | Permet de régler le mouvement du robot en fonction de la pose ou du mouvement défini par la poignée de commande d'apprentissage. Il dispose de différents ports d'E/S qui permettent la connexion et l'utilisation de différents types d'équipements et de périphériques. |
| 3 | Manipulateur | Il s'agit d'un robot collaboratif industriel qui peut être utilisé avec une variété d'accessoires d'outils pour transporter des objets ou assembler des pièces. |
| A. | Commande/surveillance | |
| B | Alimentation/réseau |