
Utilisation du mode de récupération du logiciel
Mode de récupération du logiciel
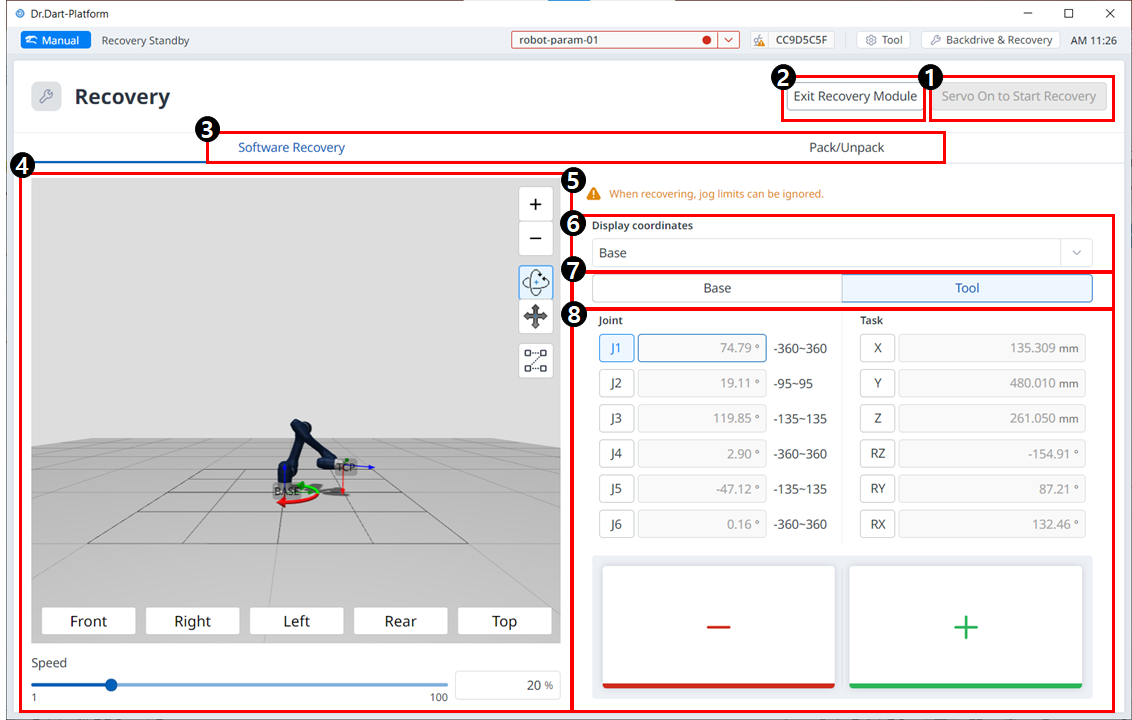
Options de menu
Article | Description | |
|---|---|---|
| 1 | Servo activé pour démarrer la récupération | Il s'agit d'un bouton permettant d'activer le servo avant de passer en mode récupération. |
| 2 | Quittez la récupération | Ce bouton vous permet de quitter le module de récupération. |
| 3 | En-tête | Cette section vous permet de sélectionner le mode récupération de logiciels ou le mode pack/déballage. |
| 4 | Simulation 3D. | Cette zone permet d'afficher un aperçu d'une simulation 3D des valeurs définies. |
| 5 | Message d'avertissement | Ceci explique les précautions à prendre. |
| 6 | Afficher les coordonnées | C'est ici que vous pouvez définir les coordonnées en fonction de la base ou du monde. |
| 7 | Bouton base/outil | C'est ici que vous pouvez définir la valeur en fonction de la base ou de l'outil. |
| 8 | Liaison/tâche | Cette section vous permet de saisir les valeurs souhaitées pour déplacer le robot. |
Pour utiliser le mode de récupération du logiciel, procédez comme suit :
- Appuyez sur le menu récupération dans la fenêtre Menu principal. L' écran récupération de logiciels apparaît automatiquement dans la fenêtre récupération.
Appuyez sur chaque bouton joint sur le côté droit de l'écran de récupération de logiciel et utilisez
- Pour les définitions des boutons du cockpit, voir Cockpit
- Les modifications apportées au paramètre sont répercutées sur la fenêtre de simulation à gauche en temps réel.
- Lorsque le réglage est terminé, appuyez sur le bouton X en haut à gauche pour fermer la fenêtre.
Attention
Le mode réparation logicielle n'est pas disponible lorsque la limite d'angle de joint est dépassée de 3 degrés.