E/S de sécurité
Cette fonction entre/sort des signaux liés à la sécurité via une borne redondante. Si un signal différent du signal d'entrée ou de sortie de sécurité redondant est détecté, le système détermine s'il s'agit d'un court-circuit ou d'un défaut matériel et arrête le robot avec le mode STO Stop.
- E/S signal de sécurité) peut être défini dans Paramètres robot > Paramètres sécurité > E/S sécurité.
Pour plus d'informations, voir E/S signal de sécurité.
Options de menu
| Article | Description | |
|---|---|---|
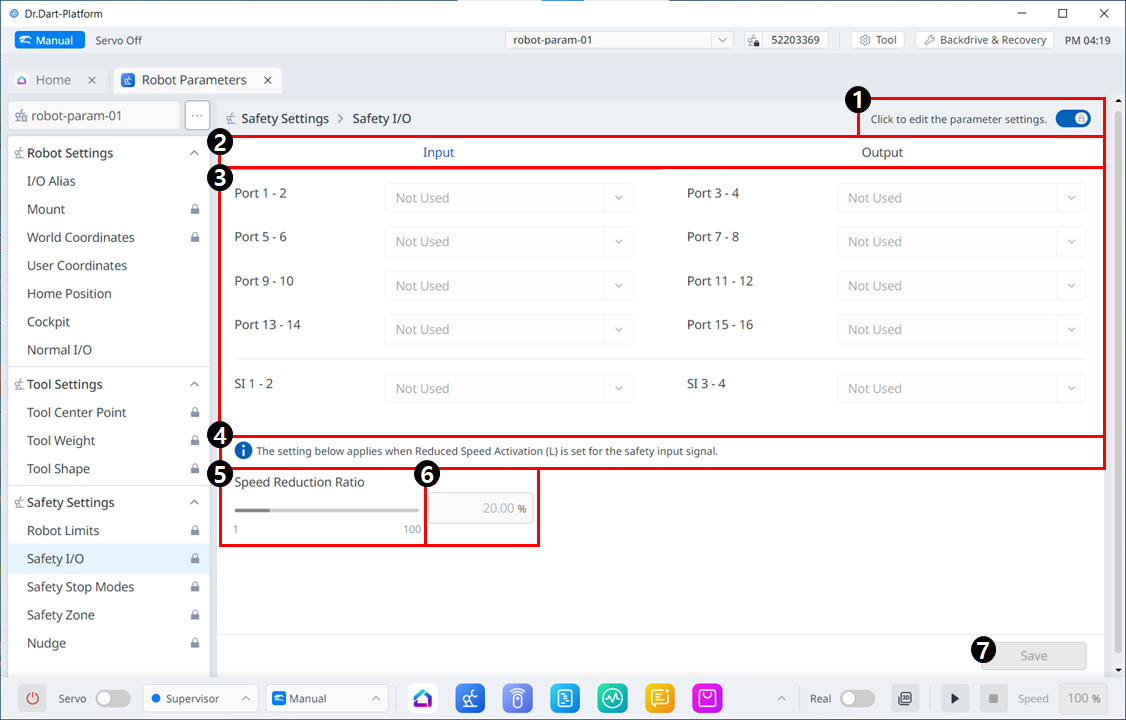
| 1 | Bouton à bascule de verrouillage | Permet de verrouiller la valeur définie. Le mot de passe de sécurité est requis pour modifier la valeur définie. |
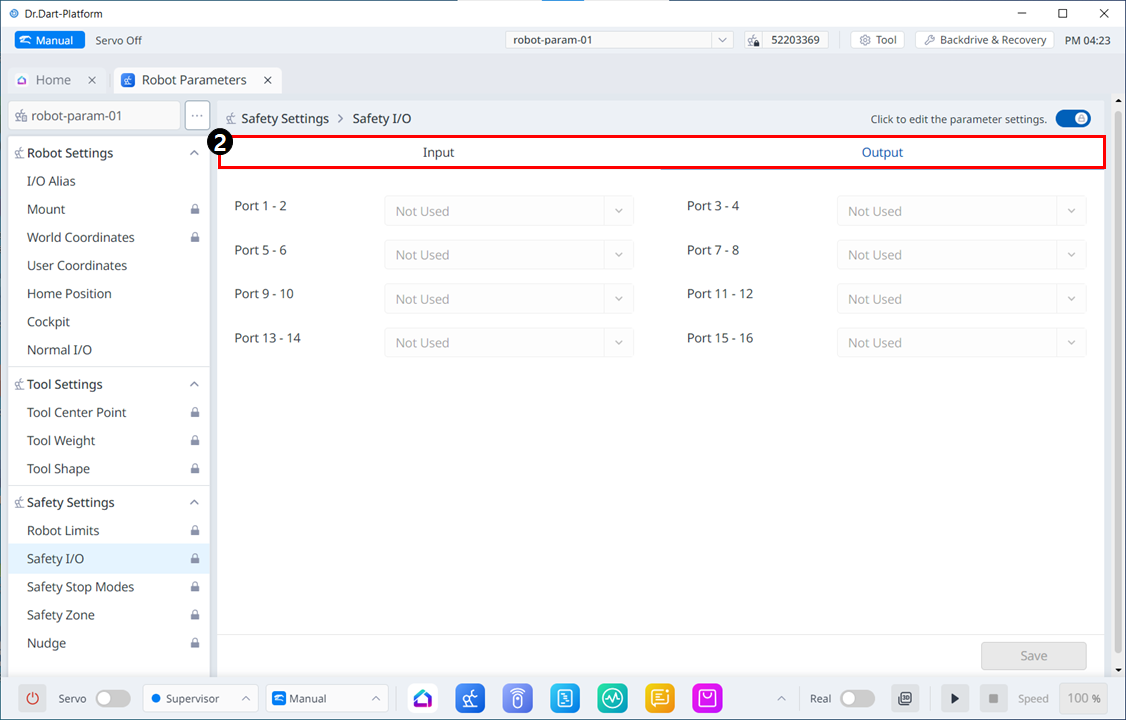
| 2 | Entrée/sortie | L'entrée/sortie peut être sélectionnée pour être définie. |
| 3 | Liste des ports | Il s'agit d'une liste de ports dans la catégorie correspondante. Les menus déroulants incluent : Non utilisé |
| 4 | Message d'avertissement | Attention à la configuration des E/S de sécurité |
| 5 | Curseur vitesse de réduction | Vous pouvez utiliser le curseur pour définir le rapport de réduction de vitesse. |
| 6 | Entrée du taux de réduction de vitesse | Le taux de réduction de vitesse peut être saisi directement. Il peut être réglé de 0 à 100 %. |
| 7 | Enregistrer | Ce bouton vous permet d'enregistrer le réglage que vous avez entré. |
L'écran sortie apparaît comme suit, similaire à entrée.