
E/S de la brida
La cubierta de la brida final del robot tiene dos conectores M8 de 8 clavijas. Consulte el gráfico a continuación para obtener información sobre la ubicación y la forma.
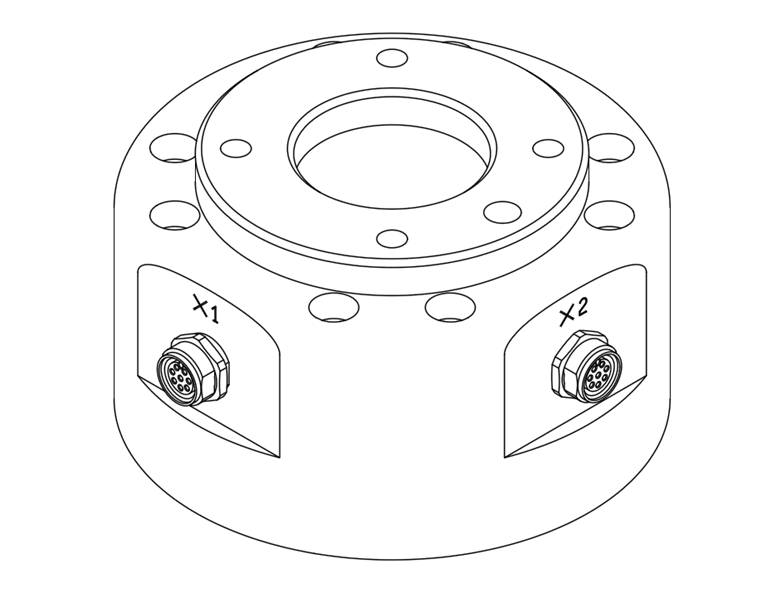
El conector suministra energía y las señales de control necesarias para operar la gripper (pinza) o los sensores integrados en herramientas específicas del robot. Los siguientes son cables industriales de muestra (se pueden usar cables equivalentes):
- Phoenix contact 1404178 (recto)
- Phoenix contact 1404182 (ángulo recto)
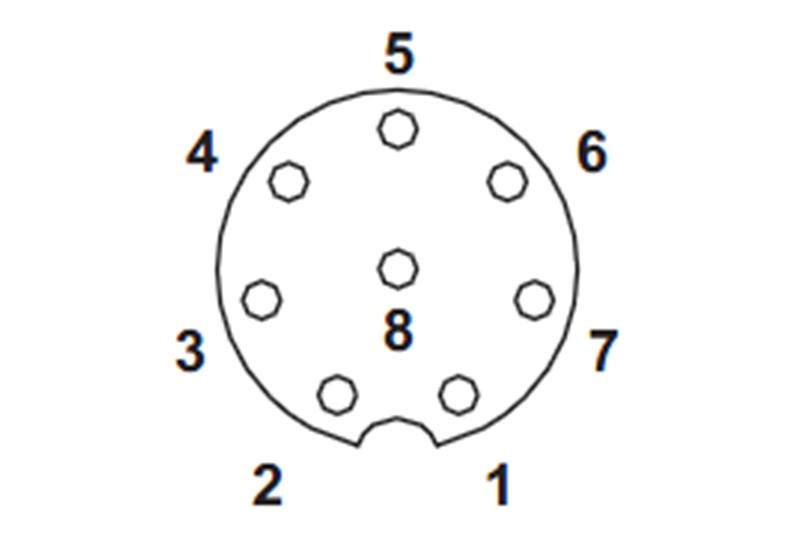
El plano de pines de cada conector es el siguiente:
Schematic Diagram
Las funciones de E/S proporcionadas por conectores X1 y X2 son diferentes. Consulte el gráfico a continuación para obtener detalles sobre las configuraciones de E/S.
Configuración X1 (E/S digital)
N.º | Señal |
1 | Digital Input 1 |
2 | Digital Output 1 |
3 | Digital Output 2 |
4 | Digital Output 3 |
5 | +24 V |
6 | Digital Input 3 |
7 | Digital Input 2 |
8 | GND |
Configuración X2 (E/S digital)
N.º | Señal |
1 | Digital Input 4 |
2 | Digital Output 4 |
3 | Digital Output 5 |
4 | Digital Output 6 |
5 | +24 V |
6 | Digital Input 6 |
7 | Digital Input 5 |
8 | GND |
La alimentación interna de la E/S de la brida está configurada en 24 V. Consulte la tabla a continuación para obtener especificaciones detalladas de la potencia durante la conexión de E/S.
Parámetro | Min | Tipo | Max | Unidad |
Supply voltage | - | 24 | - | V |
Supply current | - | - | 3 | A |
Digital output | - | 6 | - | EA |
Digital input | - | 6 | - | EA |
La configuración se ha cargado de la siguiente manera desde el 11 de abril de 2024
Configuración X1
No | Señal |
|---|---|
1 | Digital Input 1 |
2 | Digital Output 1 |
3 | Digital Output 2 |
4 | Analog Input 1 / RS-485 + |
5 | +24V / +12V / 0V (off) |
6 | Analog Input 2 / RS-485 - |
7 | Digital Input 2 |
8 | GND |
Configuración X2
| No | Señal |
|---|---|
| 1 | Digital Input 3 |
| 2 | Digital Output 3 |
| 3 | Digital Output 4 |
| 4 | Analog Input 3 / RS-485 + |
| 5 | +24V / +12V / 0V (off) |
| 6 | Analog Input 4 / RS-485 - |
| 7 | Digital Input 4 |
| 8 | GND |
I/O functions description
| Tipo | Descripción |
|---|---|
| Power | Establezca la fuente de alimentación interna en 0 V (predeterminado), 12 V o 24 V |
| Digital Output | establezca en PNP (tipo de fuente, predeterminado) o NPN (tipo de sumidero) |
| Digital Input | PNP (tipo de fuente, predeterminado) |
| Analog Input | establezca en voltaje (0-10 V) o corriente (4-20 mA, predeterminado) |
| RS-485 | Velocidad de transmisión máxima de 1 M |
Establezca la fuente de alimentación interna en 0 V, 12 V o 24 V. Las especificaciones eléctricas se muestran a continuación:
| Parámetro | Min | Tipo | Max | Unidad |
|---|---|---|---|---|
| Supply voltage (12V mode) | 11.4 | 12 | 12.6 | V |
| Supply voltage (24V mode) | 22.8 | 24 | 25.2 | V |
| Supply current | - | - | 3 | A |
Advertencia
- Instale la herramienta y la pinza de manera que no causen ningún peligro cuando se corta la corriente.
(Por ejemplo, workpiece que se cae de la herramienta)
- El terminal n.º 5 de cada conector emite 24 V en todo momento mientras se suministra energía al robot, así que asegúrese de cortar la fuente de alimentación al robot cuando configure la herramienta y la pinza.