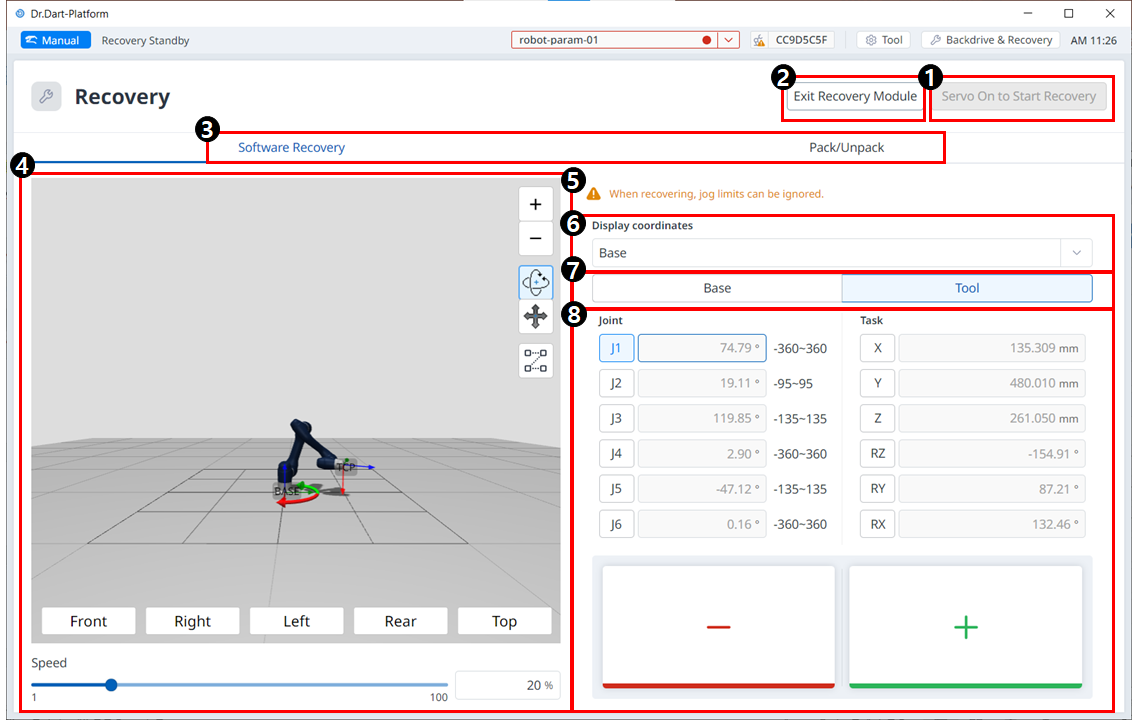
Este es un botón para activar el servo antes de entrar en el modo de recuperación.
2
Salga de la recuperación
Este botón le permite salir del módulo de recuperación.
3
Encabezado
Esta sección le permite seleccionar el modo de recuperación de software o el modo de empaquetado/desempaquetado.
4
Simulación 3D
Esta área le permite previsualizar una simulación 3D de los valores establecidos.
5
Mensaje de advertencia
Esto explica las precauciones.
6
Visualizar coordenadas
Aquí es donde puede establecer la coordenada basada en Base o Mundo.
7
Botón Base/Herramienta
Aquí es donde puede establecer el valor basado en Base o Herramienta.
8
Conjunto/Tarea
Esta sección le permite introducir los valores deseados para hacer que el robot se mueva.
Para utilizar el modo de recuperación de software, siga estos pasos:
Toqueelmenú Recuperación en la ventana Menú principal.Lapantalla de recuperación de software aparece automáticamente en la ventana de recuperación.
Toque cada botón de unión en el lado derecho de la pantalla de recuperación de software, y utilice, los botones y para establecer la posición.O pulse los botones de la cabina para ajustar el ángulo de la articulación mediante la enseñanza directa.
Para obtener definiciones de los botones de la cabina, consulte Cabina
Los cambios realizados en la configuración se reflejan en la ventana de simulación de la izquierda en tiempo real.
Cuando la configuración esté completa, toque el botón X en la parte superior izquierda para cerrar la ventana.
Precaución
El modo de reparación de software no está disponible cuando el límite del ángulo de la junta se excede en 3 grados.
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.