
Perspectiva general de la singularidad
La singularidad en un robot multijunta se refiere a una posición (o punto) donde el robot tiene dificultad para calcular su siguiente postura durante el movimiento. Los robots multijunta calculan cada ángulo de articulación durante el movimiento en función del extremo del robot
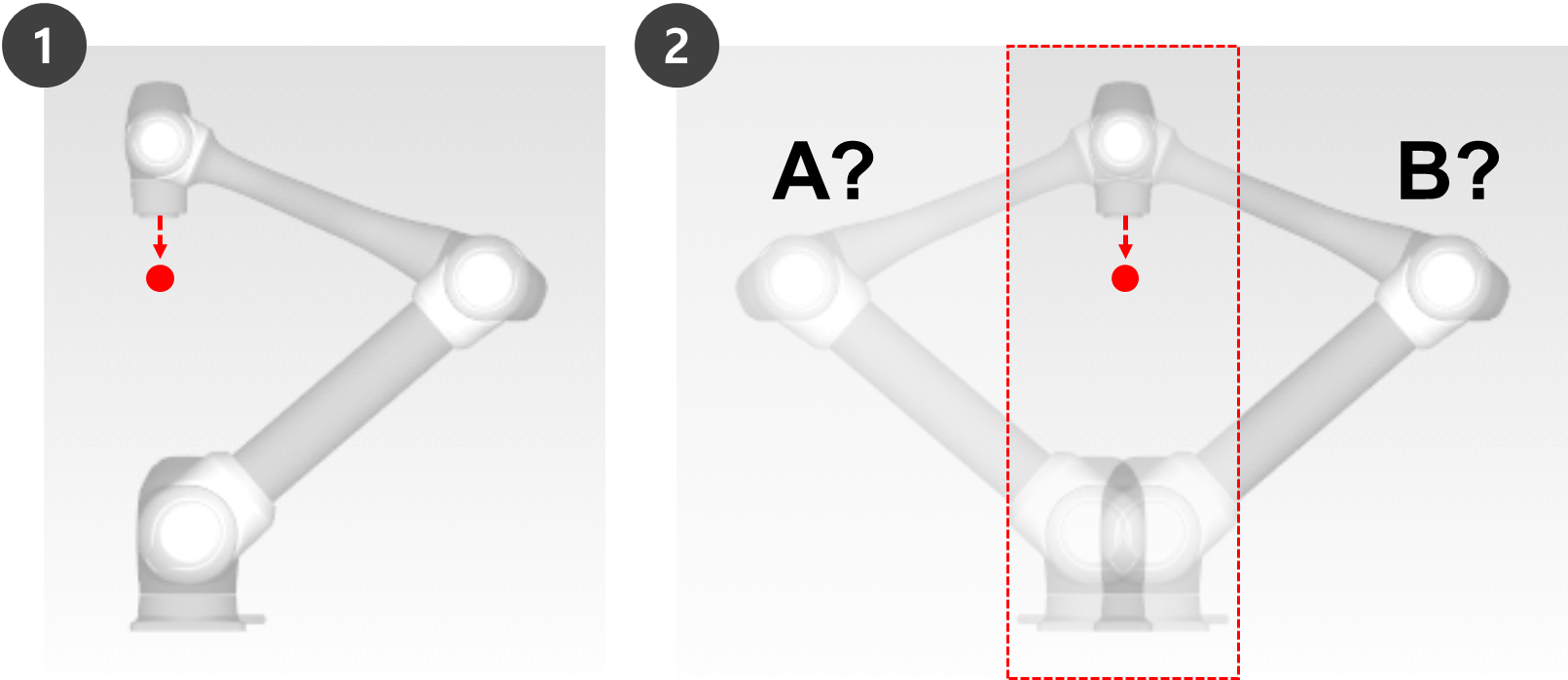
Por ejemplo, en la Fig. 1 A continuación, cuando el robot se mueve al punto rojo, el robot no podrá determinar si mover sus articulaciones para establecer la posición A o la posición B, como se muestra en la Fig. 2. Esta posición (o punto) se denomina singularidad.
Cerca de una singularidad, el movimiento del robot no es fluido en términos de plano, punto y línea, el movimiento lineal del extremo del robot puede no mantenerse y el error de posición durante el control puede aumentar. La singularidad se produce en tres casos como se muestra en la siguiente figura, incluso cuando las juntas del robot forman una línea.
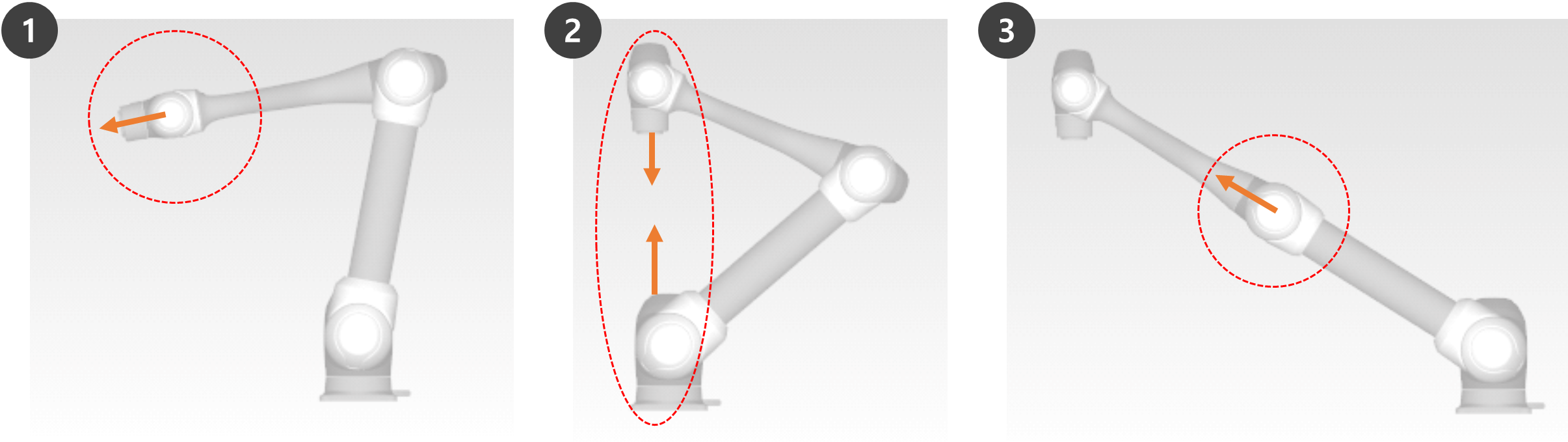
Singularidad de muñeca: Cuando la muñeca del robot forma una línea a medida que el Eje 5 se aproxima a 0º
- En comparación con un brazo humano, los ejes 4, 5 y 6 corresponden a la articulación de la muñeca.
- Singularidad de reborde: Cuando los ejes 1 y 6 están en la misma línea
- En comparación con un brazo humano, los ejes 1 y 2 corresponden a la articulación del hombro.
- Singularidad de codo: Cuando el robot forma una línea a medida que el Eje 3 se aproxima a 0º
- Cuando se compara con un brazo humano, el Eje 3 corresponde al codo.
Precaución
Las operaciones manuales y automáticas que se mueven con la rotación de la junta no están influenciadas por la singularidad.
- Movimiento de tareas, comando Movel, etc.
- La singularidad solo se produce durante el funcionamiento manual y automático donde el robot termina realizando movimiento lineal.
- Movimiento conjunto, comandos MoveJ, etc.
- En la zona de singularidad, el control de fuerza o el control de cumplimiento no están disponibles.
- Como la velocidad de rotación de ciertos ejes aumenta rápidamente cuando un movimiento lineal pasa una singularidad, es posible que se produzca una violación del límite de velocidad de la junta o una violación del límite del ángulo de la junta.
Cómo evitar la singularidad
Los robots Doosan Robotics ofrecen opciones para evitar singularidades durante el control de movimiento. Sin embargo, se recomienda configurar una tarea que no cree excepciones mediante comandos de movimiento conjunto como MoveJ en zonas de singularidad.