
Configurar coordenadas de referencia base para mover
Para mover el robot según sus coordenadas base:
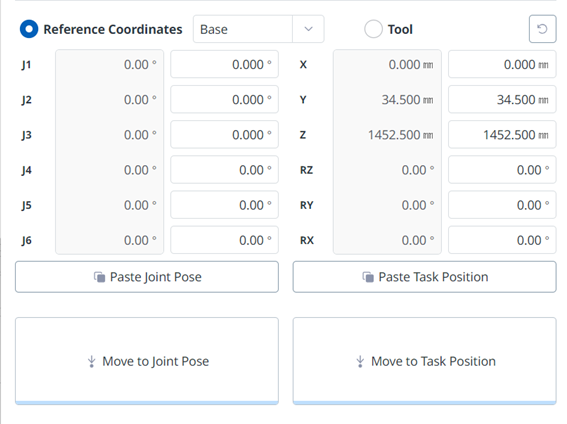
- Seleccione la pestaña Mover y luego seleccione el elemento Coordenada de referencia.
- Seleccione la coordenada de visualización como base.
- Toque y mantenga presionado el botón para moverse a la posición de tarea correspondiente y moverse a las coordenadas establecidas.