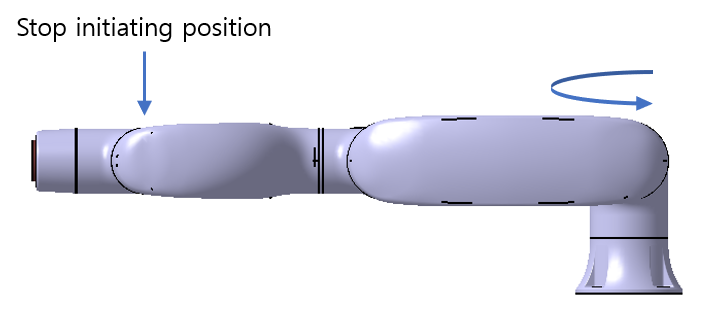
La medición de la articulación 1 se realiza con el eje giratorio perpendicular hacia el suelo y durante el movimiento horizontal.
Las mediciones de la articulación 2 y la articulación 3 se realizan con el eje giratorio paralelo al suelo y cuando el robot se detiene en un movimiento descendente vertical hacia el suelo.
Nota
Para las mediciones se consideran las peores circunstancias. La medición puede variar según las circunstancias
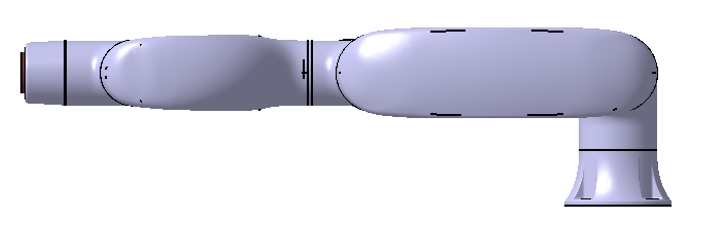
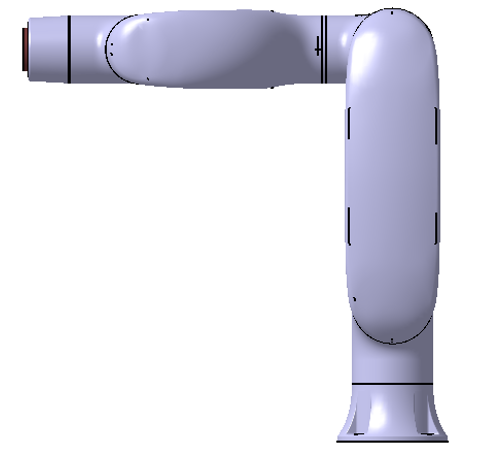
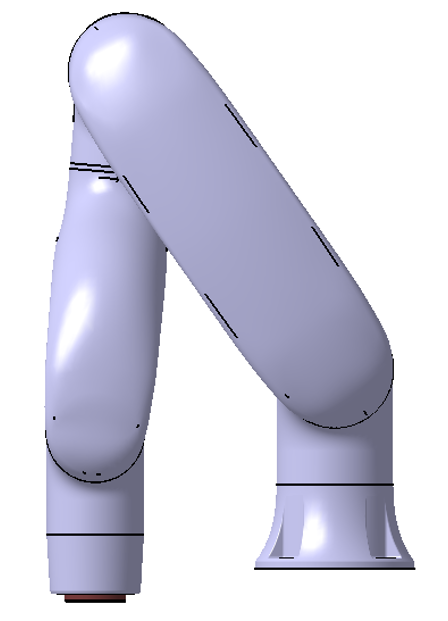
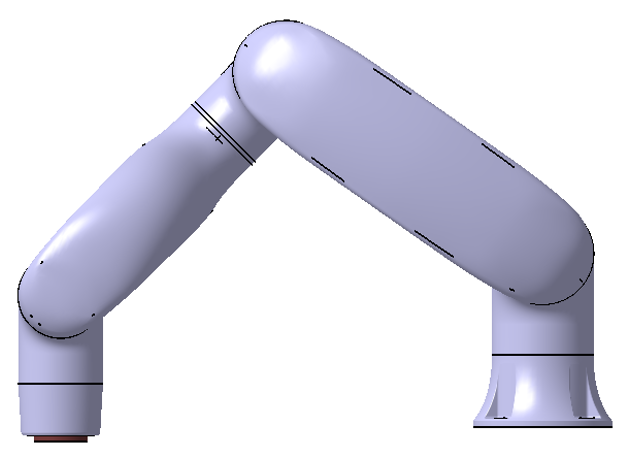
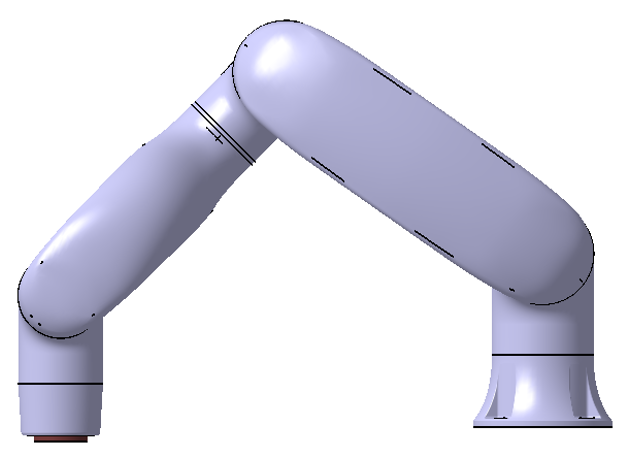
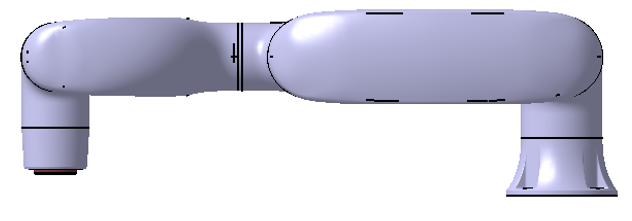
The pose for 33%, 66%, and 100% of extension
Joint 1
Joint 2
Joint 3
100% extension
Stop category 0
33% extension
Stop category 1
-
66% extension
Stop category 1
-
100% extension
Stop category 1
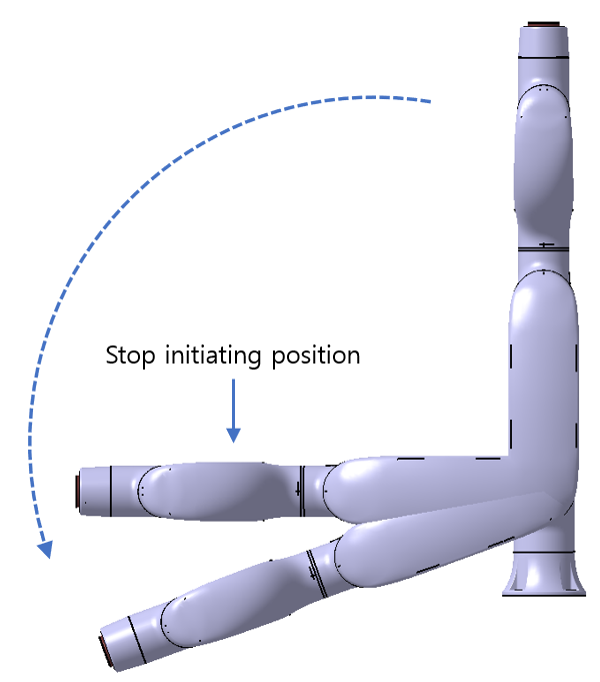
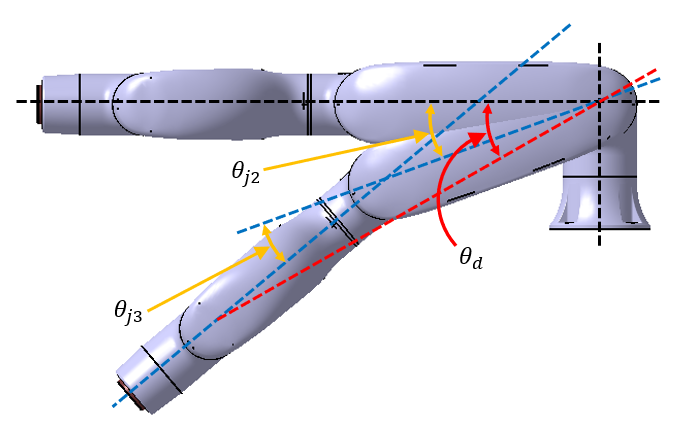
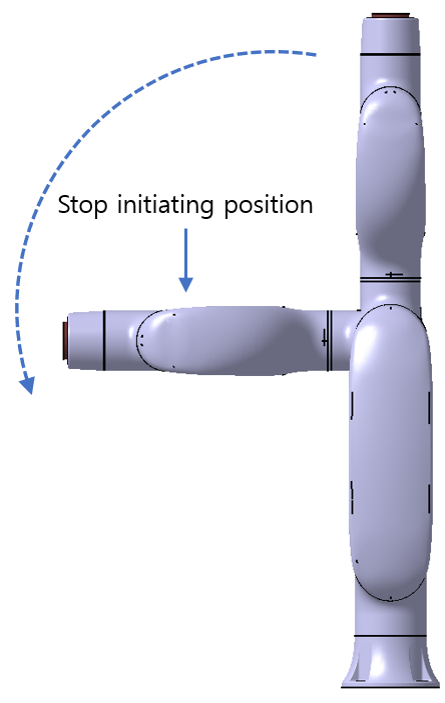
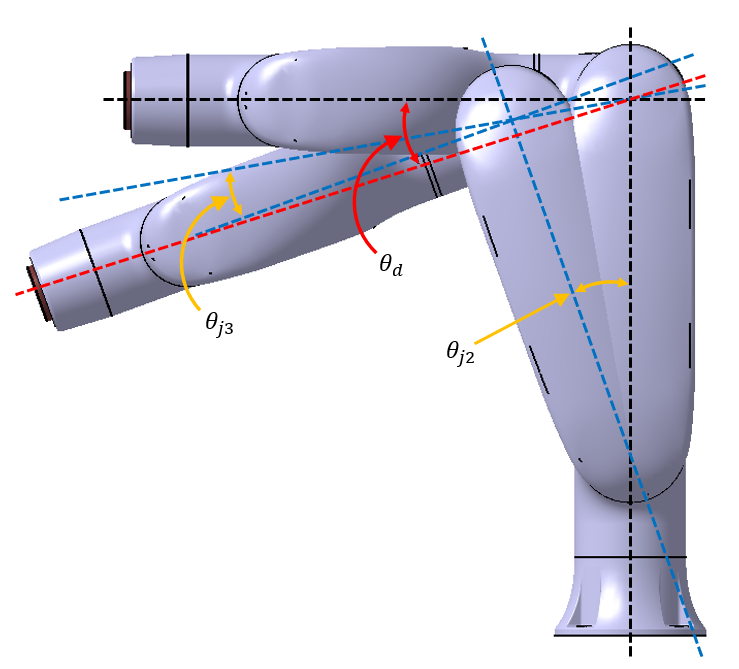
The pose when the stop is initiated and the measured angle ()
Pose when the stop is initiated
Measured Angle
Joint1
No slip,
Joint2
Joint3
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.