
Nombres y funciones
Manipulador
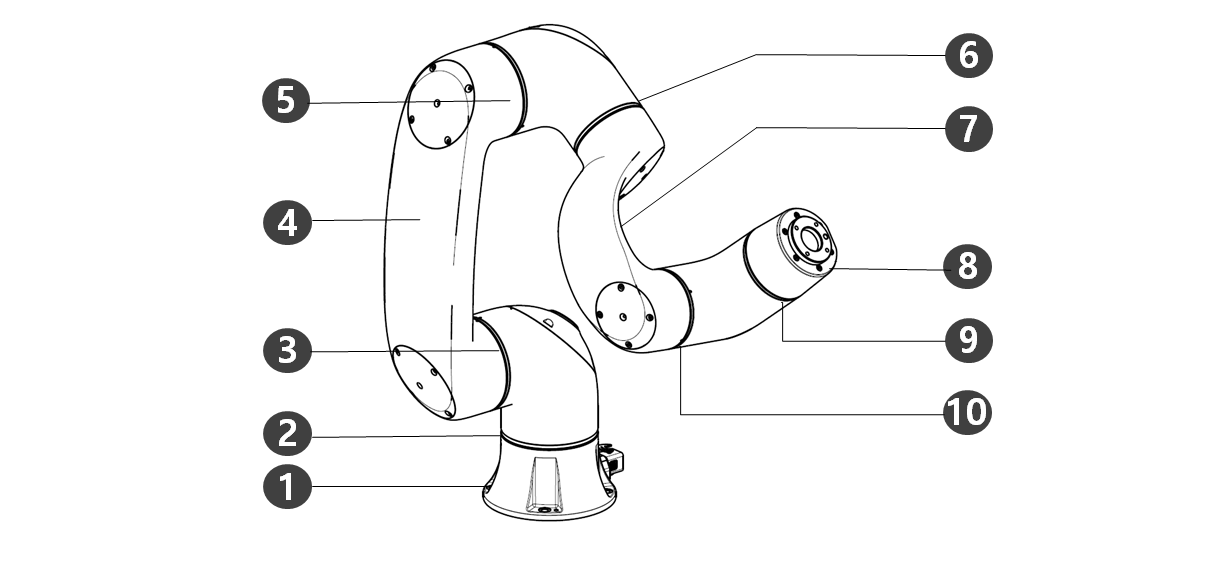
Nombres de piezas
No | Nombre | No | Nombre |
|---|---|---|---|
1 | Base | 6 | J4 |
2 | J1 | 7 | link2 |
3 | J2 | 8 | Brida de herramienta |
4 | link1 | 9 | J5 |
5 | J3 | 10 | J6 |
Se trata de funciones clave
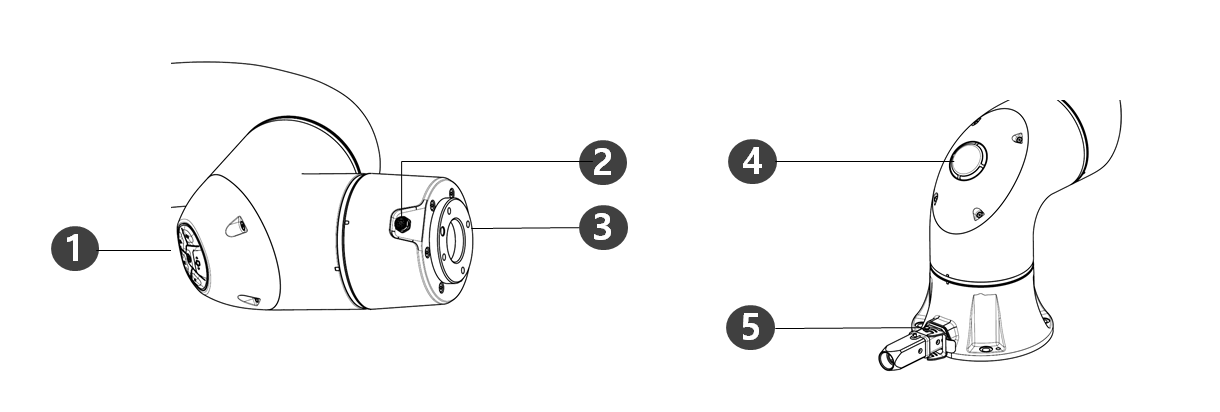
No | Elemento | Descripción |
|---|---|---|
1 | [Opción] Controlador utilizado para la enseñanza directa. | |
2 | E/S de brida | Puerto de E/S para el control de la herramienta. |
3 | Brida de herramienta | Área para instalar herramientas. |
4 | LED | Muestra el estado del robot con diferentes colores. Para obtener más información sobre el estado del robot, consulte “ Color de LED de estado y brida para cada modo.” |
5 | Conector | Se utiliza para suministrar alimentación y para la comunicación del robot. |
Controlador
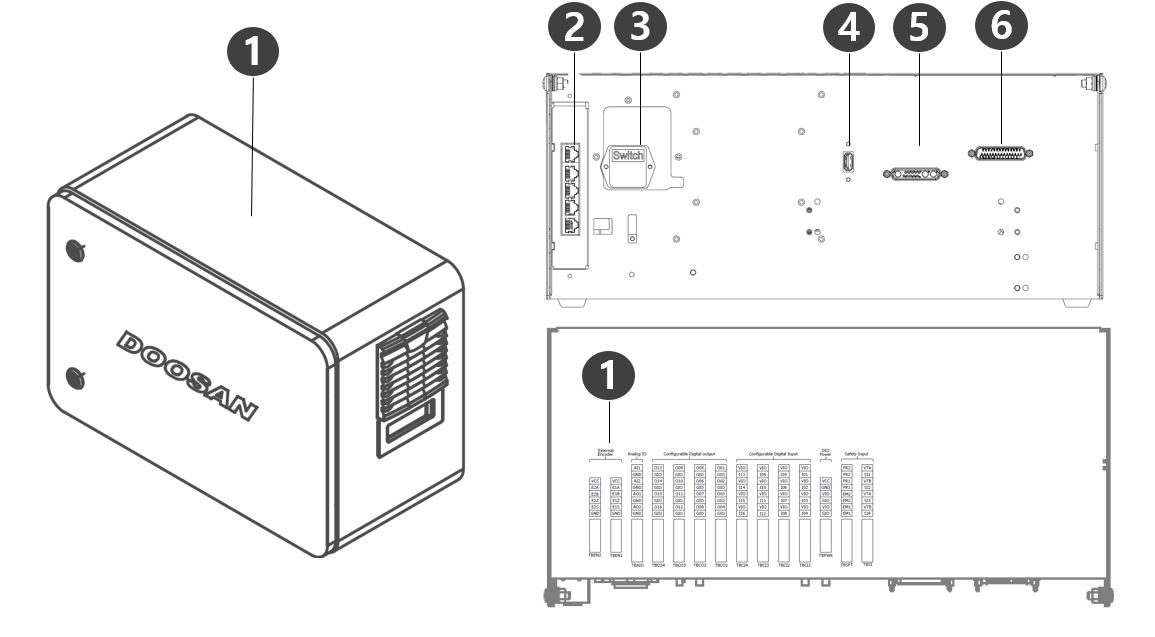
No | Elemento | Descripción |
|---|---|---|
1 | Terminal de conexión de E/S (interno) | Se puede conectar con controladores o periféricos de otros robots. |
| 2 | Terminal de conexión de red | Se utiliza para conectarse al terminal de conexión de red dentro del controlador para utilizar ordenadores portátiles, dispositivos TCP/IP y equipos Modbus. |
| 3 | Terminal/interruptor de conexión de alimentación | Se utiliza para conectar la alimentación eléctrica del controlador para encenderlo o apagarlo. Para obtener más información, consulte Encienda/apague el sistema. |
| 4 | Terminal de conexión USB | Se utiliza para almacenar los registros creados mientras el robot funciona en el almacenamiento USB o las tareas de exportación e importación. |
| 5 | Terminal de conexión del cable del manipulador | Se utiliza para conectar el cable del manipulador al controlador. |
| 6 | Terminal de conexión del cable del control colgante de aprendizaje | Se utiliza para conectar el cable de la unidad de programación al controlador. |
Control colgante de programación
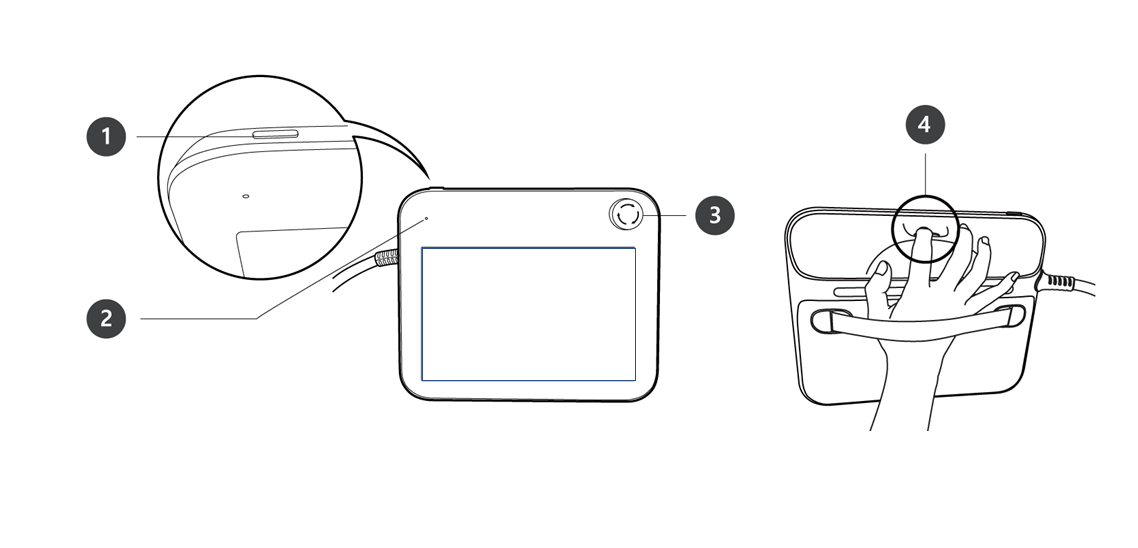
No | Elemento | Descripción |
|---|---|---|
1 | Botón de encendido | Se utiliza para ENCENDER/APAGAR la alimentación principal del control manual de programación. Para obtener más información, consulte Encienda/apague el sistema. |
2 | LED de alimentación | LED se ENCIENDE cuando se suministra alimentación. |
3 | Botón de parada de emergencia | En caso de emergencia, pulse el botón para detener el funcionamiento del robot. |
4 | Botón de guía manual | Mantenga pulsado el botón para mover el robot libremente a la posición deseada. |
Nota
- Si el colgante Teach necesita ser protegido y montado durante el funcionamiento, la cubierta suave suministrada por nosotros hace que sea más seguro y fácil de usar.