
Configuración del sistema
| No | Nombre | Descripción |
|---|---|---|
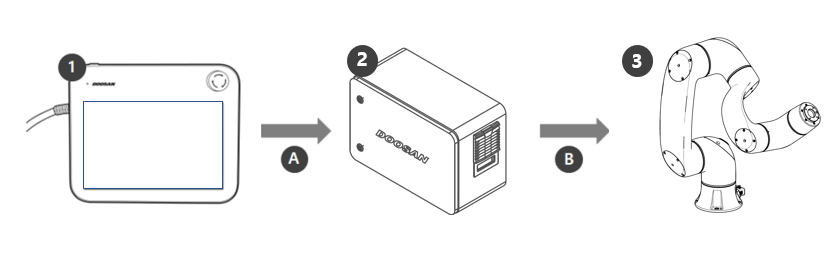
| 1 | Control colgante de programación | Este dispositivo gestiona todo el sistema y es capaz de enseñar al robot posturas específicas o hacer ajustes relacionados con los manipuladores y controladores. |
| 2 | Controlador | Se utiliza para ajustar el movimiento del robot de acuerdo con la postura o el movimiento establecido por el control colgante de aprendizaje. Cuenta con varios puertos de E/S que permiten la conexión y el uso de varios tipos de equipos y dispositivos. |
| 3 | Manipulador | Este es un robot colaborativo industrial que se puede utilizar con una variedad de accesorios de herramientas para transportar objetos o ensamblar piezas. |
| A | Comando/Supervisión | |
| B | Fuente de alimentación/Red |