Punto central de herramienta
Al configurar el punto central de la herramienta (TCP), también se debe definir la posición y el ángulo de rotación basados en las coordenadas de la brida. En este momento, la distancia desde el punto de inicio predeterminado de la coordenada de brida hasta el punto central de la herramienta (TCP) enla X, Las direcciones Y y Z no se pueden definir para que sean superiores a 10000 mm.Además, tenga en cuenta que el control de fuerza, 
Si el punto central de la herramienta (TCP) se configura mediante el cálculo automático, el cálculo se realiza basándose únicamente en las posiciones X, Y y Z, por lo que es necesario introducir el ángulo de rotación. El ángulo de rotación se puede definir con RZ, RY y RX y se basa en el método de rotación “ Euler Z-Y-Z”.
Las definiciones del eje de coordenadas expresado con x, y, z y el eje de coordenadas expresado con X, Y, Z son las siguientes:
- Eje de coordenadas de “Coordenada de brida” (x, y, z): La dirección del eje de coordenadas de la “coordenada de brida ”definida en el extremo de la brida es idéntica a la coordenada del robot cuando el ángulo de la junta del robot es (0,0,0,0,0,0).
- Eje de coordenadas de la “coordenada TCP” (X, Y, Z): Esto se establece en el extremo o en el punto de trabajo de la herramienta instalada en el extremo de la brida. En este momento, el ángulo de rotación de la “Coordenada TCP” se define en base a la “ Coordenada de brida”en el orden de 1) a 3) de lo siguiente:
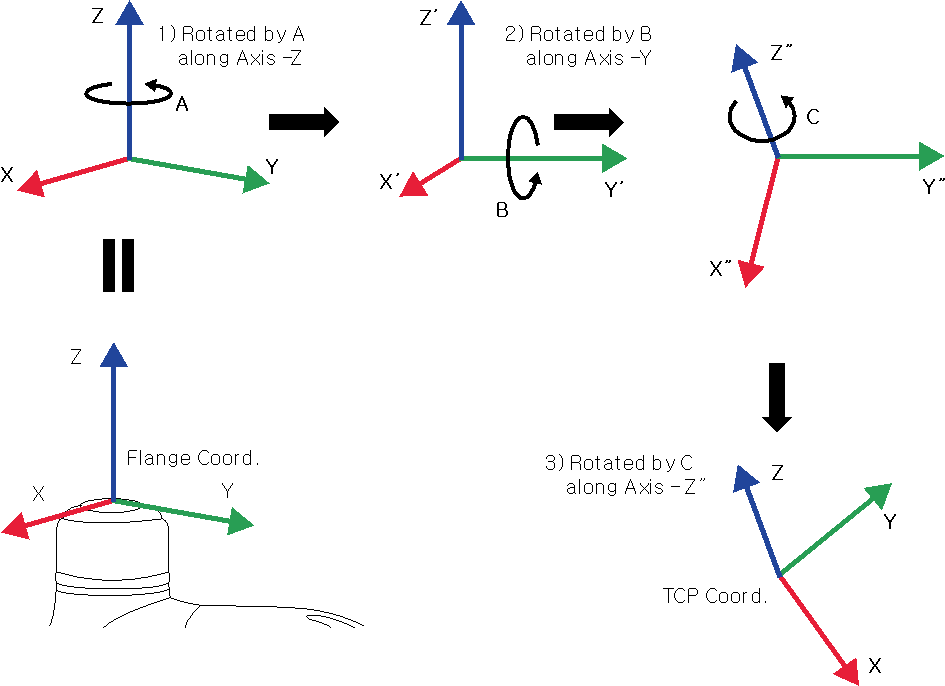
1) Gire A grados a lo largo del eje z de la coordenada de brida.
2) Rotar grados B a lo largo del eje y’ de la coordenada girada de acuerdo con 1).
3) Girar C grados a lo largo deleje z’’ de la coordenada girada de acuerdo con 2).
Aquí hay algunos ejemplos de configuración del TCP de acuerdo con el método descrito anteriormente:
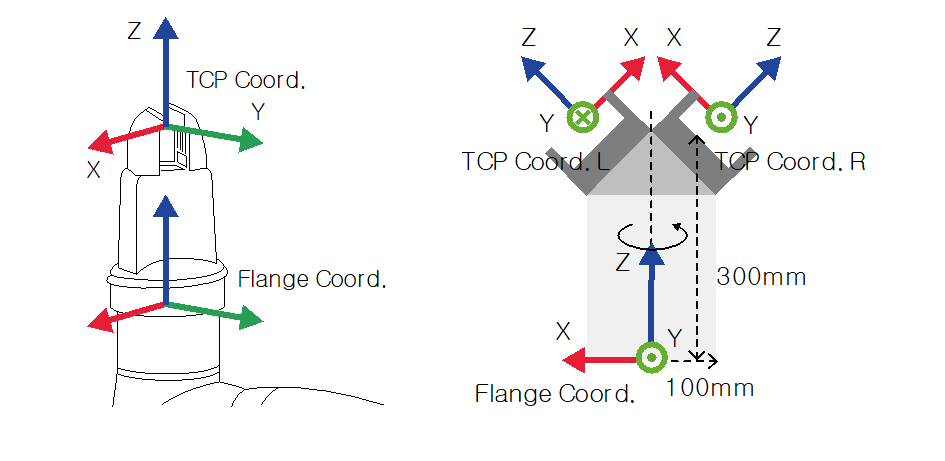
- [X, Y, Z, A, B, C] = [0, 0, 100, 0, 0, 0]: Pinza general con sólo un desplazamiento de dirección Z (coord TCP)
- [X, Y, Z, A, B, C] = [100, 0, 300, 180, -45, 0]: Pinza izquierda con ángulo de 45 grados (TCP Coord. L)
- [X, Y, Z, A, B, C] = [-100, 0, 300, 0, -45, 0]: Pinza derecha con ángulo de 45 grados (TCP Coord. R)
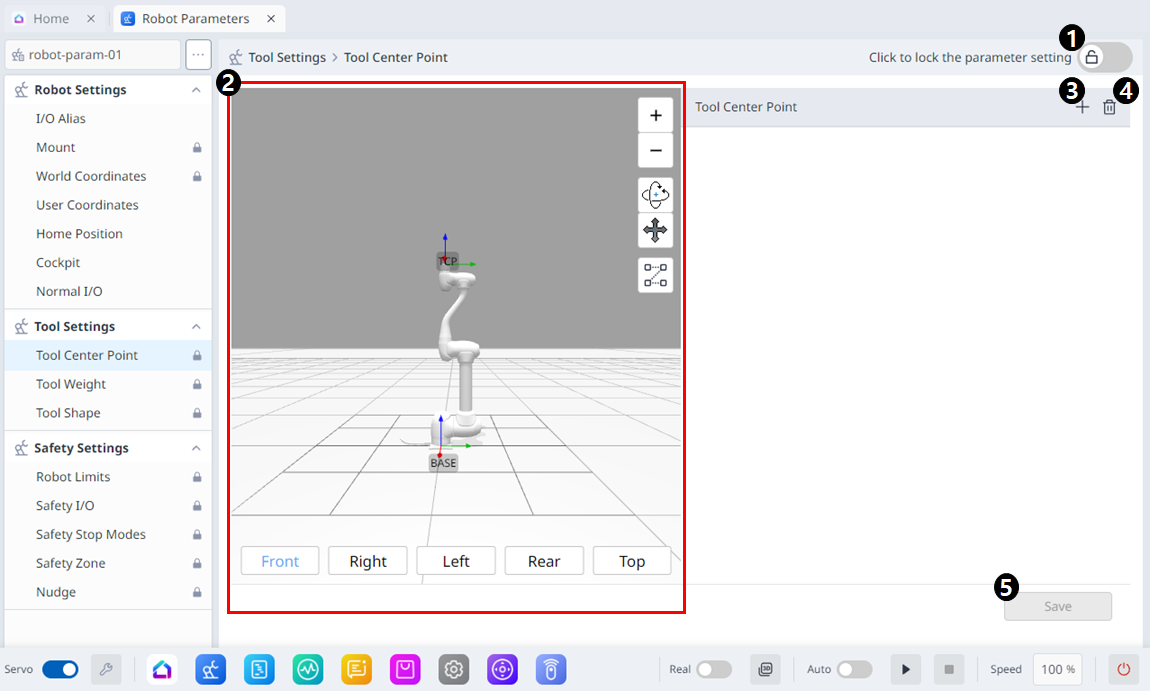
| Elemento | Descripción | |
|---|---|---|
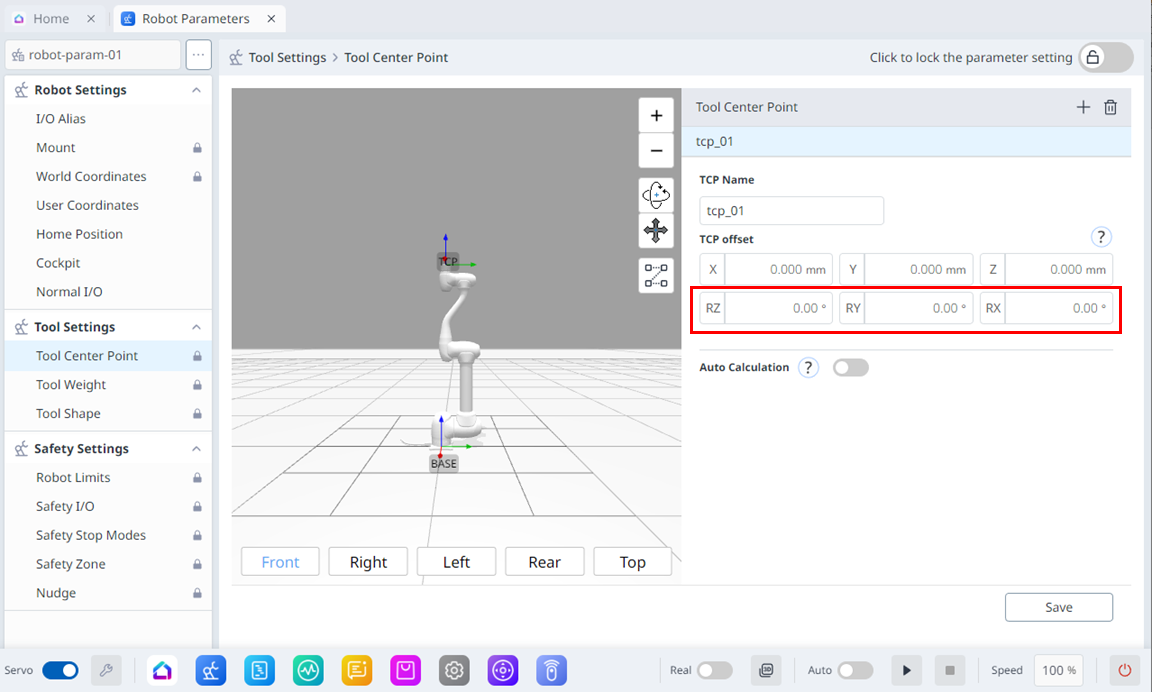
| 1 | Botón de conmutación de bloqueo | Se utiliza para bloquear el valor establecido. La contraseña de seguridad es necesaria para modificar el valor. |
| 2 | Simulación 3D | Aquí es donde puede simular el punto central de la herramienta configurado. |
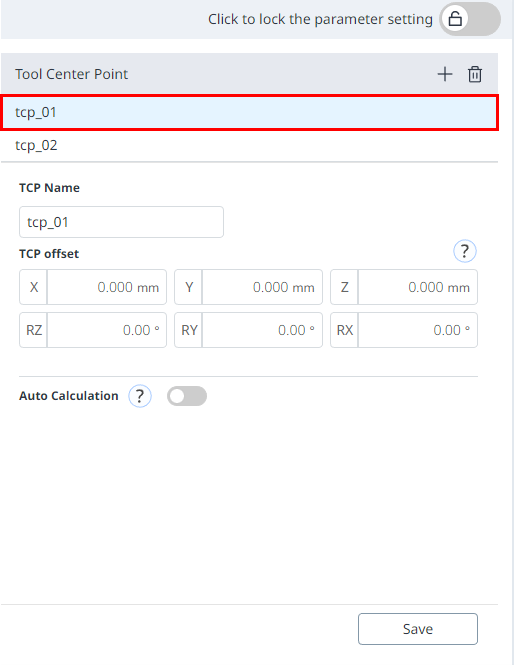
| 3 | Agregar | Este botón le permite agregar TCP. |
| 4 | Eliminando | Este botón permite eliminar el TCP seleccionado. |
| 5 | Guardar | Este botón permite guardar los valores de ajuste. |
Cuando los ajustes están bloqueados, se muestra la siguiente pantalla.
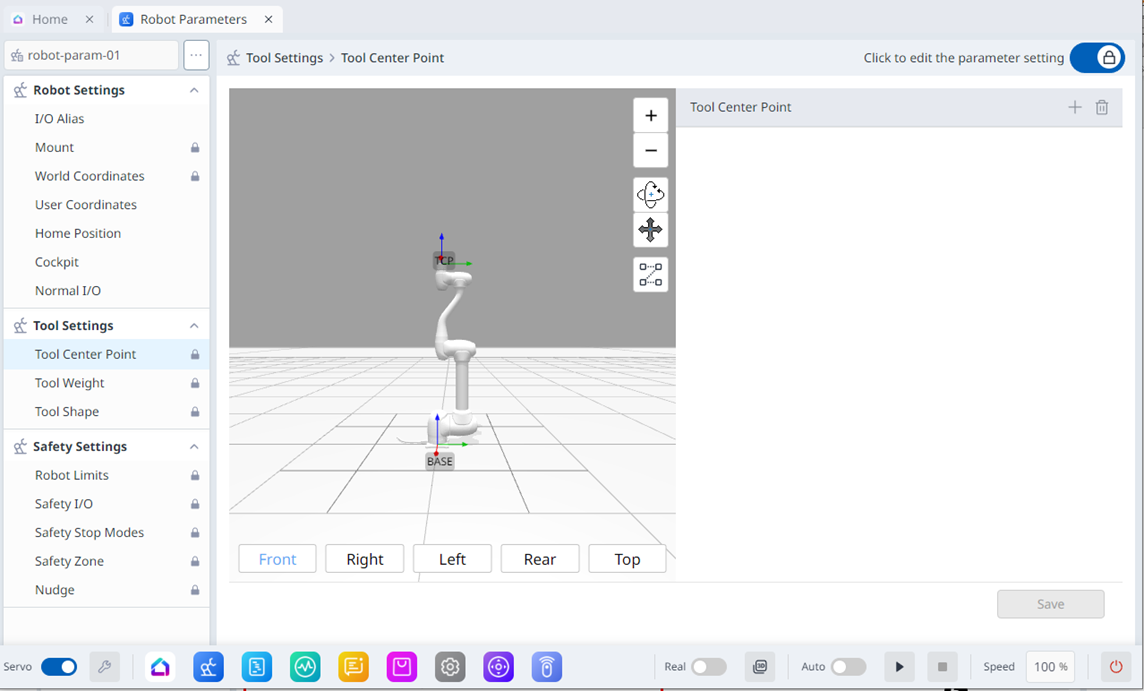
En este momento, el TCP seleccionado se ve en azul como se muestra a continuación.