
Descripción general de Sub/Call Sub
OPCIONAL NORMAL 5 MIN
Sub es una abreviatura de subrutina. Una subrutina se refiere a un proceso que minimiza el número de pasos en un programa llamando a las partes necesarias cuando hay dos o más partes duplicadas.
- Los robots de Doosan Robotics proporcionan un comando CallSub para llamar a los comandos Sub y al subpárrafo correspondiente.
- El comando Sub funciona como se define en Python.
Nota
- El subpárrafo debe agregarse en MainSub, el inicio de un párrafo principal, y EndMainSub, el final de un párrafo principal.
- Además de la repetición, el comando Sub también se utiliza para simplificar un párrafo principal. La utilización de un subcomando permitirá una identificación intuitiva de la tarea de un párrafo principal que se está realizando en este momento.
- La utilización de un comando Sub permite la prueba de unidad Sub Párrafo.
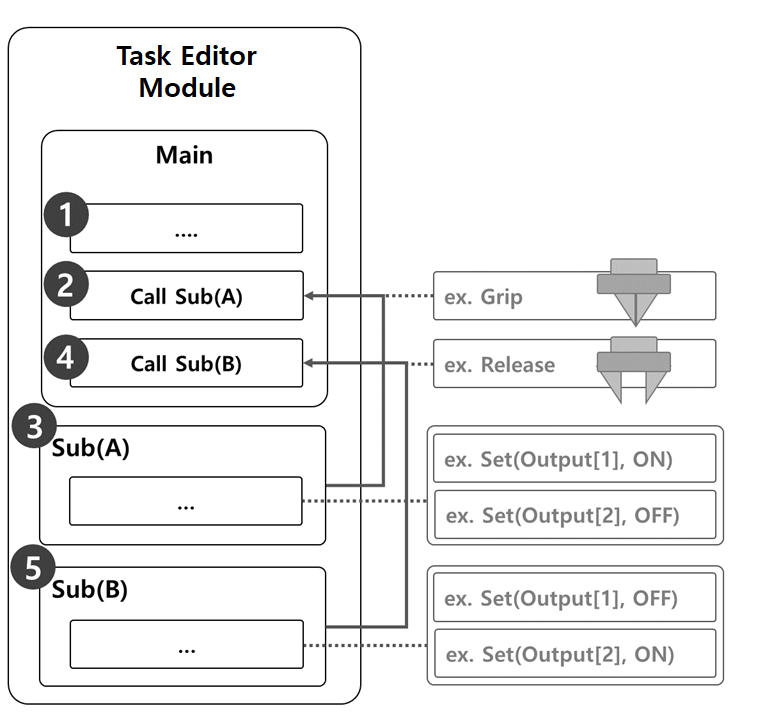
La muestra en la que se utiliza un comando Sub para ejecutar los movimientos de agarre y liberación de una pinza de robot consta de lo siguiente.
- Las líneas del párrafo principal ejecutan el programa de tareas en orden secuencial a partir de la primera línea.
- Mover a Sub(A) llamado por Call Sub.
- Muestra
- Programa: Llame a la subrutina Grip.
- Robot: Sin movimiento.
- Muestra
- Se ejecuta SUB(A). Todas las líneas de subpárrafo se ejecutan en orden secuencial, vuelve al párrafo principal y ejecuta la siguiente línea.
- Muestra
- Programa: Ejecute las líneas de la subrutina Grip en orden secuencial. Utilice el comando SET para establecer la salida [1] como ON y la salida [2] como OFF.
- Robot: La pinza del robot ejecuta el movimiento de agarre.
- Muestra
- Mover a Sub(B) llamado por Call Sub.
- Muestra
- Programa: Llame a la subrutina Release.
- Robot: Sin movimiento.
- Muestra
- Se ejecuta SUB(B). Todas las líneas de subpárrafo se ejecutan en orden secuencial, vuelve al párrafo principal y ejecuta la siguiente línea.
- Muestra
- Programa: Ejecute las líneas de la subrutina Grip en orden secuencial. Utilice el comando SET para establecer la salida [1] como OFF y la salida [2] como ON.
- Robot: La pinza del robot ejecuta el movimiento de liberación.
- Muestra
Agregar subcomando
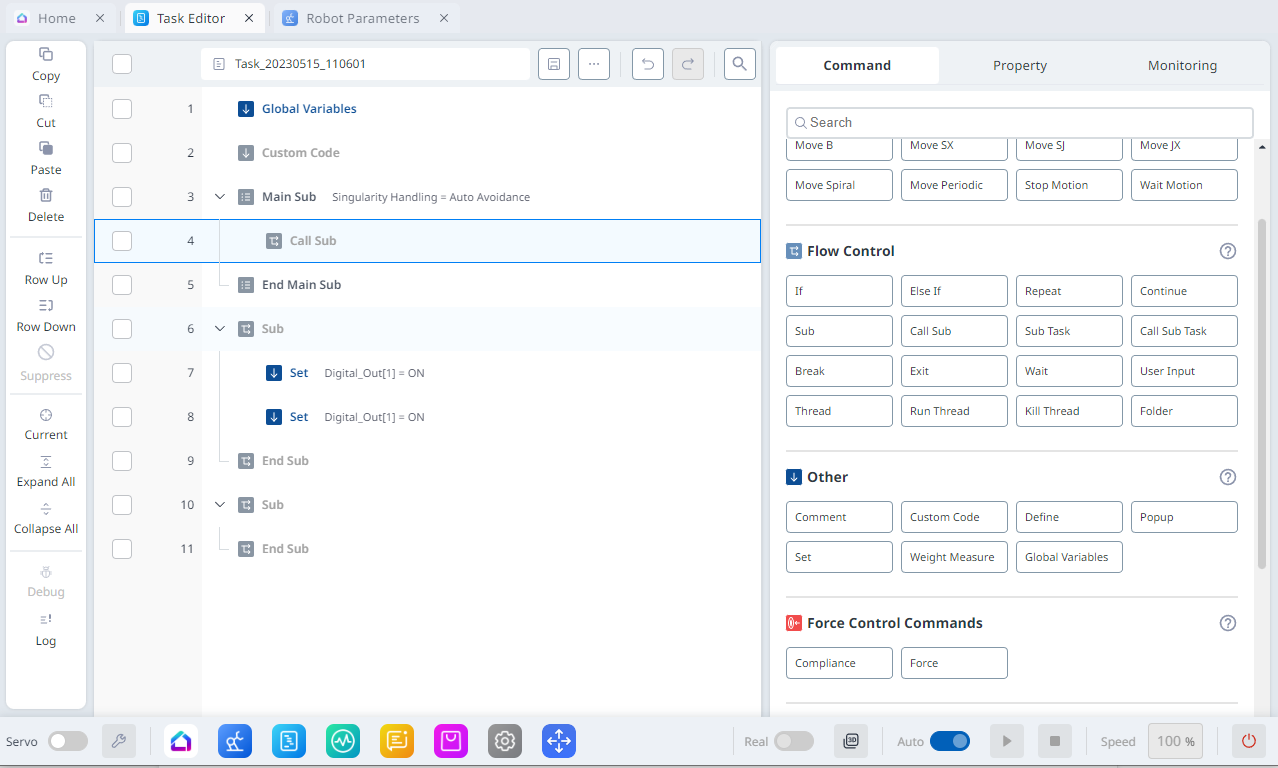
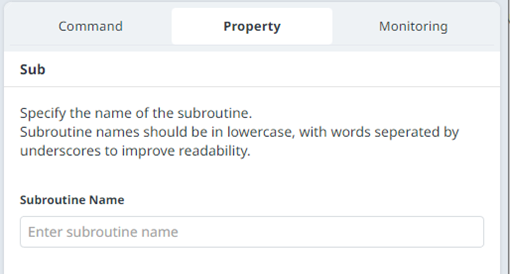
- En el módulo Editor de tareas, en la sección Control de flujo del menú Comando de la derecha, agregue un subcomando.
- Introduzca el nombre de la subrutina.
Agregar comando CallSub
- En el módulo Editor de tareas, en la sección Control de flujo del menú Comando de la derecha, agregue un subcomando Llamar.
- Seleccione el nombre de la subrutina registrada con el subcomando.

Nota
- Si el número de líneas aumenta en el programa de tareas, puede resultar difícil encontrar subrutinas. En tal caso, toque la subrutina Go to selected en el comando Property of CallSub para mover el foco a la línea de comandos Sub correspondiente.