Descripción general de las propiedades de movimiento del robot del Editor de tareas
OBLIGATORIO NORMAL 15 MIN
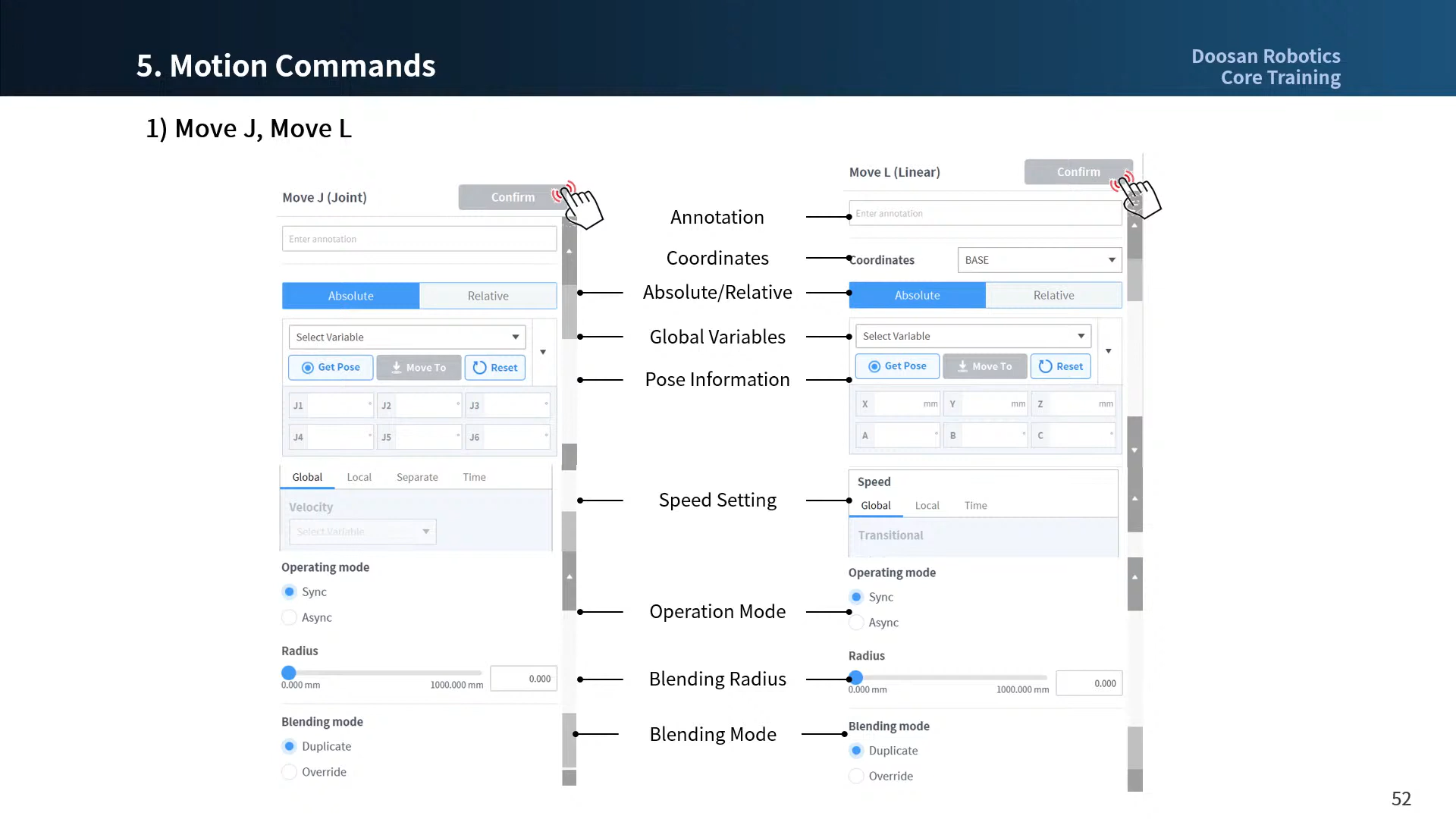
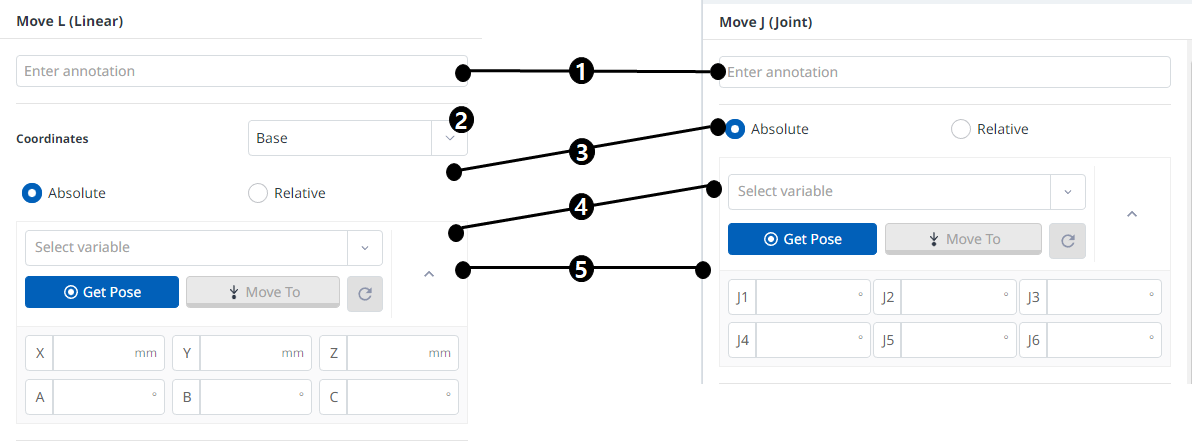
Es la pantalla de propiedades de los comandos Motions, MoveJ y Movel estándar. Otros movimientos también tienen propiedades similares.
- Si el movimiento se crea con ajustes mínimos, solo se debe introducir la información de pose (5 en la siguiente figura).

| Nombre | Descripción | |
|---|---|---|
| 1 | Anotación | Descripción o anotación del comando que se puede encontrar en la ventana de tareas |
| 2 | Coordenadas |
|
| 3 | Seleccione Mover tipo |
|
| 4 | Seleccione variable | Se puede seleccionar la información de pose registrada como variables |
| 5 | Información de pose | Se introduce la información de pose
|
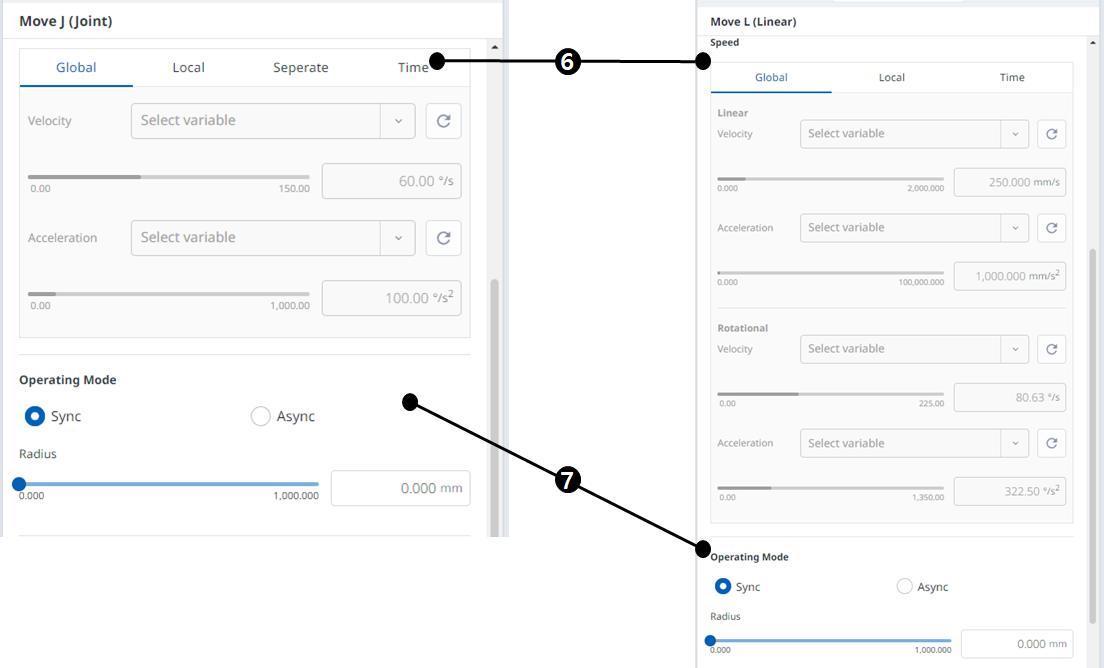
| 6 | Ajuste de velocidad |
|
| 7 | Modo de funcionamiento |
|
| 8 | Modo de fusión | La opción utilizada para determinar si se ignora o sobrescribe el movimiento anterior según el modo de fusión del movimiento siguiente cuando el radio se establece como una opción del movimiento anterior |
Modo de funcionamiento
Sincronizar
Puede pasar al siguiente comando con Sincronizar cuando se complete el comando en curso. Se establece como predeterminado y se utiliza en situaciones generales.
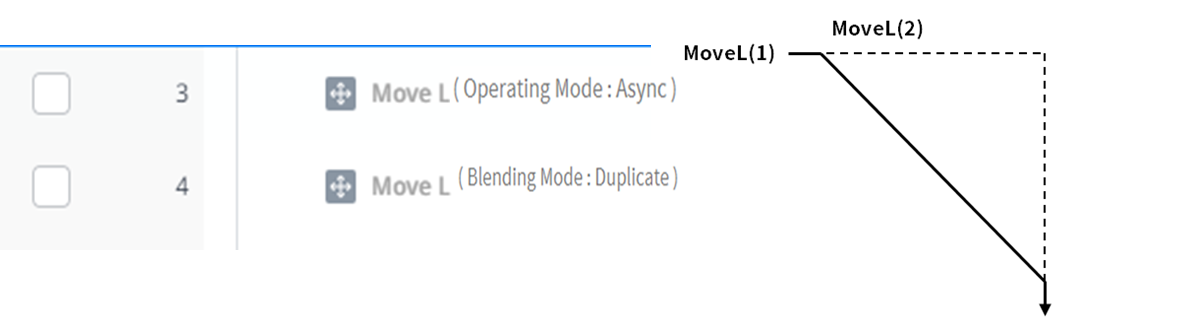
Asíncrono
Async inicia el siguiente comando simultáneamente cuando comienza el comando de movimiento. Se utiliza para conectar suavemente diferentes movimientos, y también se utiliza cuando la salida de señal se enciende / apaga simultáneamente cuando el movimiento comienza.
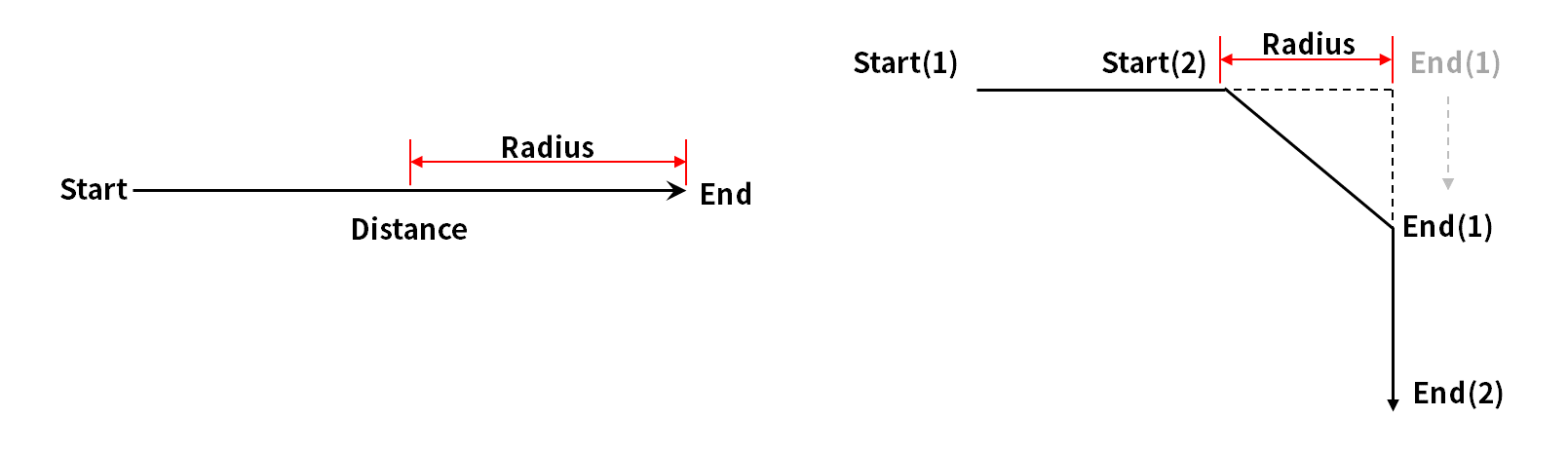
Radio
La opción Radio activa la función asíncrona en la sección RADIUS antes de que el comando de movimiento alcance su punto de destino. Con esta opción, es posible conectarse sin problemas al siguiente comando de movimiento sin detener el comando de movimiento actual. El radio está configurado en 0 mm de forma predeterminada.
Precaución
La opción RADIUS tiene las siguientes características y límites:
- La función RADIUS sólo se puede utilizar en el modo SYNC.
- Las condiciones y los cálculos se pueden realizar en la sección asíncrona dentro del radio.
- El radio no puede superar los 1/2 mm de la distancia total entre la ubicación actual y la ubicación de destino antes de que se ejecute el movimiento.
- ej. Si la distancia de movimiento es de 100 mm, el radio máximo disponible es de 50 mm.
- Los comandos de movimiento que no pueden aplicar fusión entre movimientos son los siguientes: La fusión ya se aplica en estos comandos, por lo que aplicar radio a estos comandos y ejecutarlos provoca errores. El uso de comandos, como WaitMotion y stopmotion, puede ayudar a evitar errores.
- MoveSX, MoveSJ, MovePeriodic, MoveSpiral, MoveB
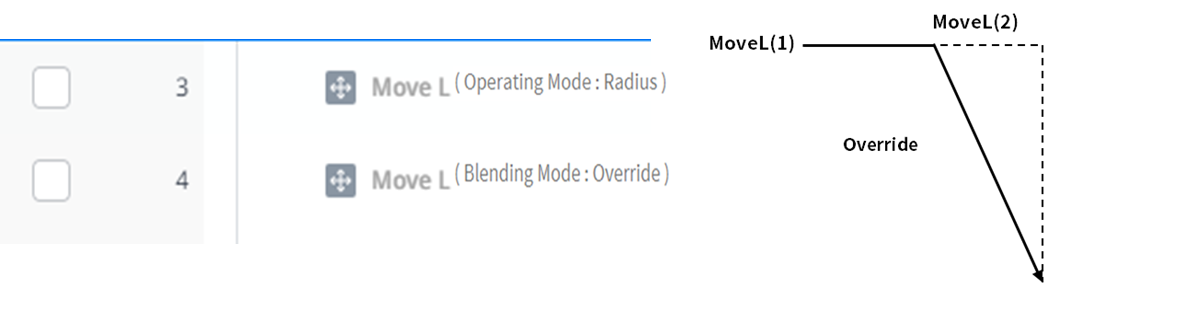
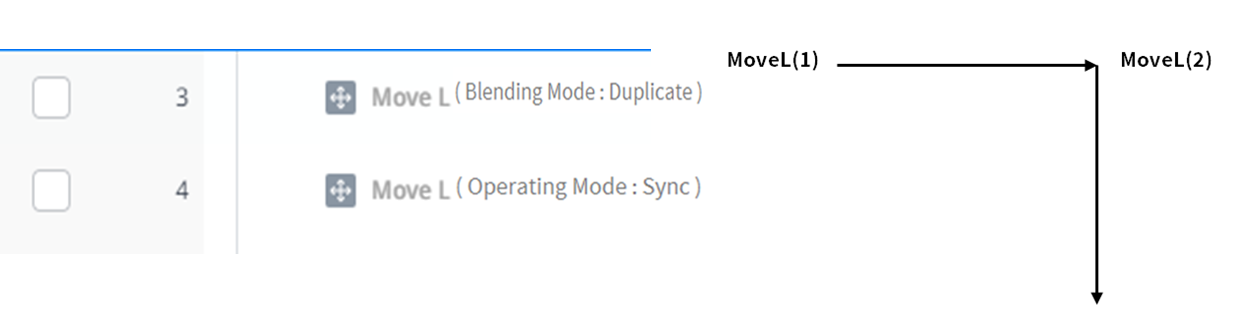
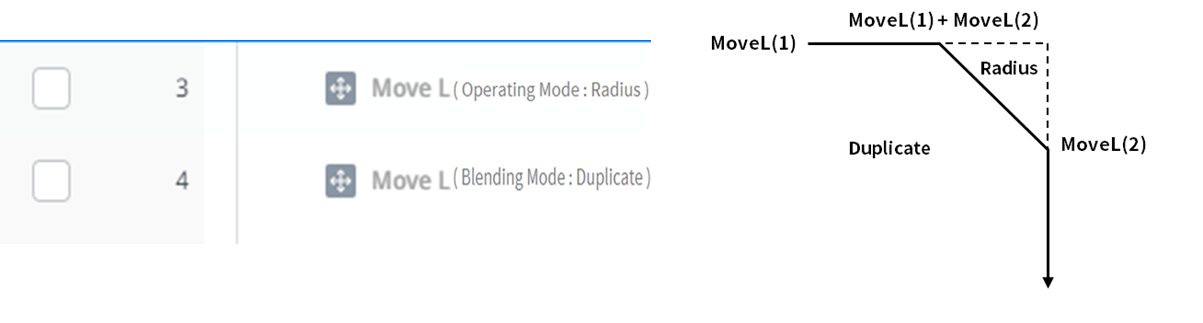
Modo de fusión
Es la opción utilizada para determinar si ignorar o sobrescribir el movimiento anterior según el modo de fusión del movimiento siguiente cuando el radio se establece como una opción del movimiento anterior.
Duplicado
Duplicar es un modo que mantiene el movimiento anterior para permitir que el movimiento siguiente se superponga con el movimiento anterior.
Sustituir
Ignorar ignora y sobrescribe el movimiento anterior para ejecutar el movimiento siguiente.