
Conexión de E/S del controlador
Los terminales de E/S del controlador se pueden utilizar para conectar equipos externos que no sean manipuladores y control colgante de programación al controlador. Además de los dispositivos de seguridad, como el interruptor de parada de emergencia, la cortina de luz y las alfombrillas de seguridad, se pueden conectar varios periféricos necesarios para configurar una célula de trabajo del robot, como válvulas solenoides neumáticas, relés, PLC y codificadores de cinta transportadora.
La E/S del controlador está organizada de la siguiente manera.
- Bloque de terminales para entrada de contacto de seguridad (TBSFT): Para conectar dispositivos necesarios para la parada de emergencia y la parada de protección
- Bloque terminal de alimentación de E/S digital (TBPWR)
- Bloque de E/S digital configurable (TBCI1- 4, TBCO1– 4): Para conectar periféricos necesarios para el funcionamiento del robot
- Bloque de terminales de E/S analógicas (TBAIO)
- Bloque de terminales para entrada de codificador (TBEN1, TBEN2)
- Bloque de terminales para salida de contacto de seguridad (TBSTO): Para conectar a la línea de alimentación de los periféricos del robot y detener el robot cuando entra en el estado STO cortando también la alimentación a los periféricos
La siguiente figura muestra la disposición de la interfaz eléctrica dentro del controlador.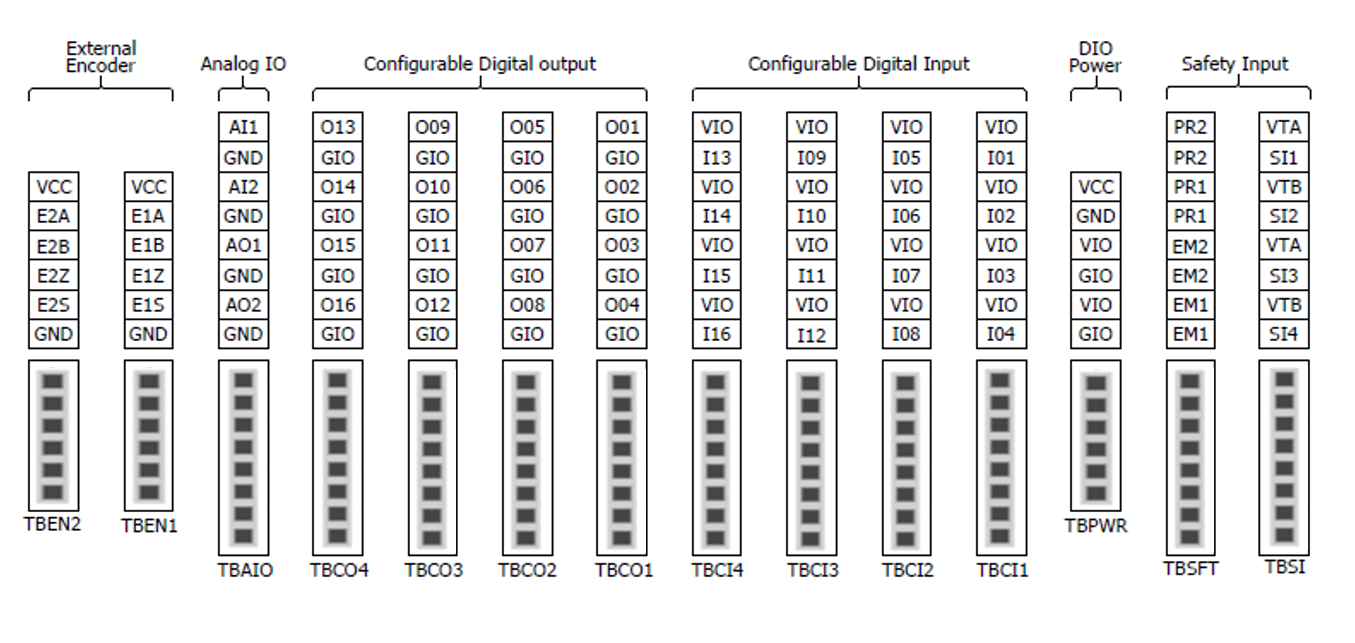
Precaución
- Para evitar el riesgo de daños y funcionamiento incorrecto del producto, asegúrese de apagar la alimentación cuando conecte los terminales a la E/S del controlador
- Doosan Robotics no compensará ningún daño al producto debido a una conexión incorrecta de los terminales o negligencia del usuario.
- Al desconectar la alimentación del controlador, asegúrese de apagar también la fuente de alimentación externa.