Conexión de dispositivo externo: Plataforma DART
La plataforma DART es un software que se ejecuta en un equipo de escritorio o portátil basado en el sistema operativo Windows. Una vez que el controlador y el ordenador de sobremesa/portátil están conectados a través del puerto LAN, todas las funciones del control colgante de aprendizaje están disponibles desde el momento en que se ejecuta la plataforma DART. En este momento, se requiere el siguiente procedimiento de configuración para conectar con subcontroladores dentro del controlador.
Búsqueda de direcciones IP y configuración de conexión
Configuración de la conexión de comunicación
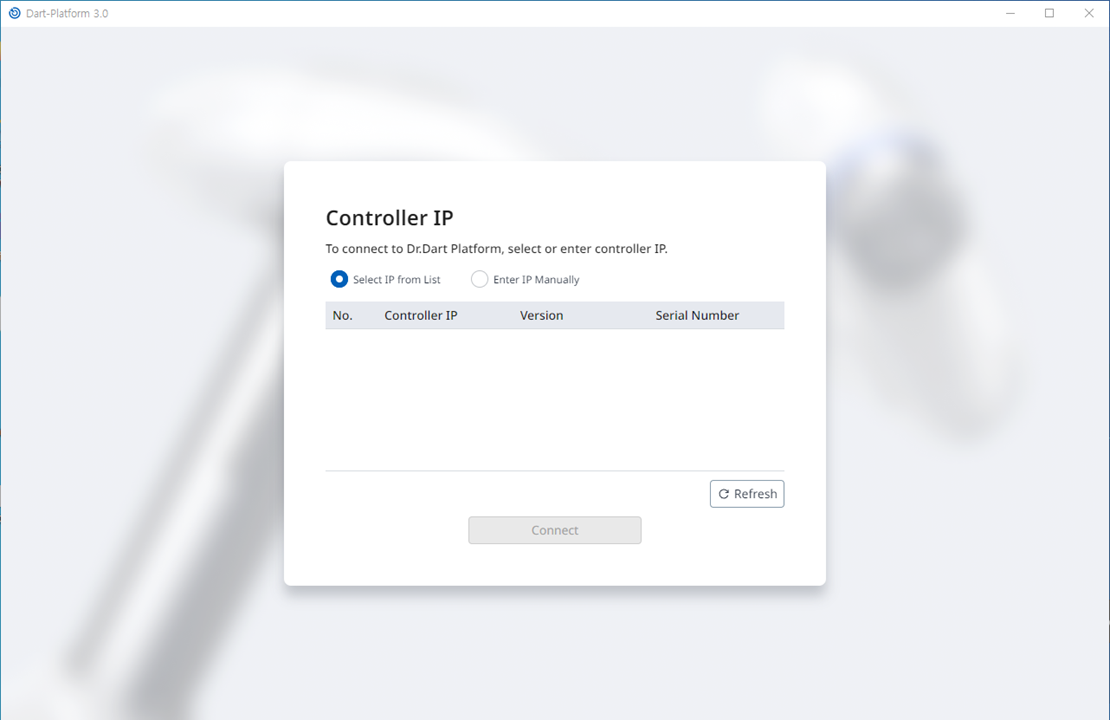
Cuando se ejecuta la plataforma DART después de conectar el portátil al puerto LAN del controlador, se buscan automáticamente la dirección IP del controlador, la información de versión del subcontrolador y el número de serie del robot necesario para establecer una conexión.
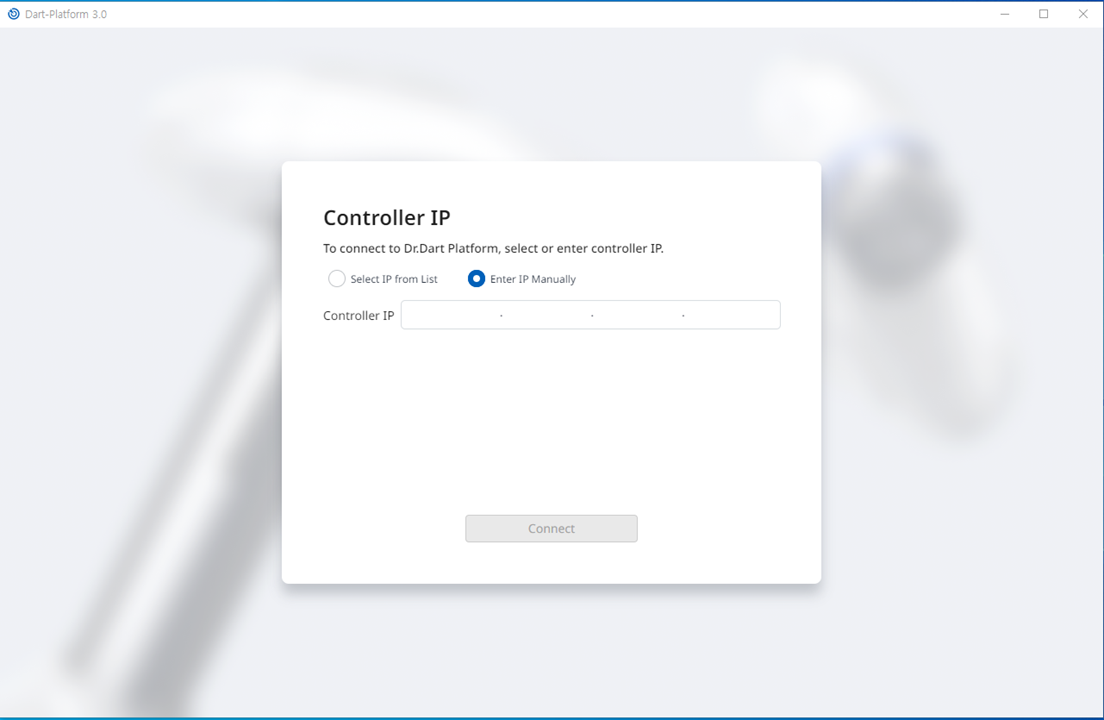
Si la búsqueda falla, presione el botón Actualizar para actualizar o toque Introducir IP manualmente para ingresar manualmente la IP del controlador.
Al seleccionar el número de serie del robot que se va a conectar y pulsar el botón Conectar, se establece una conexión entre la plataforma DART y el subcontrolador y permite que el robot funcione con normalidad.
Si hay un problema con la conexión, intente el procedimiento siguiente, pero si este problema persiste, póngase en contacto con el personal de ventas o de servicio para obtener ayuda.
- Si no se muestran los resultados de búsqueda de la dirección IP del controlador conectable, la información de la versión del subcontrolador y el número de serie del robot: Pulse el botón Actualizar para volver a buscar e intente conectarse de nuevo según el procedimiento anterior.
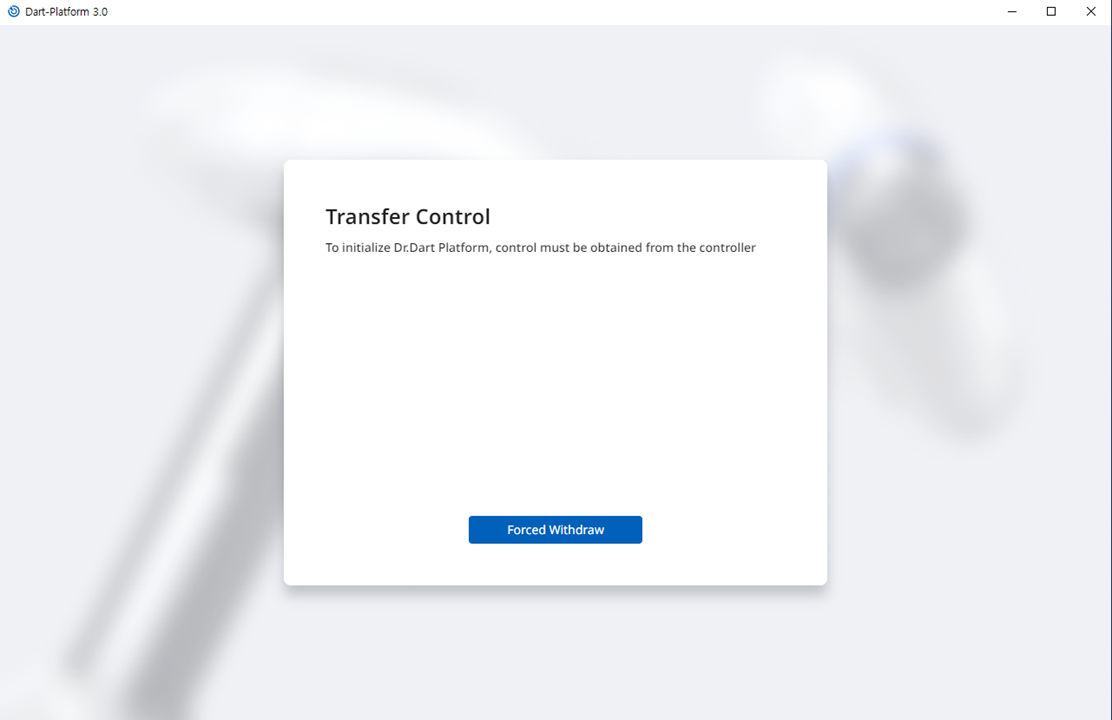
Luego, si ve la página Control de transferencia como se muestra a continuación, toque el botón Retirada forzada para intentar conectarse con la Plataforma.