¿Qué es Euler Angle A, B, C?
El Ángulo Euler es una forma de expresar los ángulos de los ejes X, Y y Z, que son perpendiculares entre sí en la dirección del objeto. A, B y C se refieren a los ángulos de rotación secuencial. Cada fabricante del robot define este orden de rotación A, B y C de forma diferente, como Rz-Ry-Rx o Rx-Ry-Rz.
Doosan Robotics utiliza Rz-Ry-Rz. Aquí , Rz significa la rotación en el eje Z, y Ry significa la rotación en el eje Y. Rz se puede expresar como ángulo A, Ry como ángulo B y Rz como ángulo C para indicar la dirección de rotación actual de un objeto. Tenga en cuenta que una vez que se realiza la rotación en dirección del eje Z desde las coordenadas, las rotaciones se realizarán en función de las nuevas coordenadas.
Esto se puede visualizar en los pasos 1 a 4.
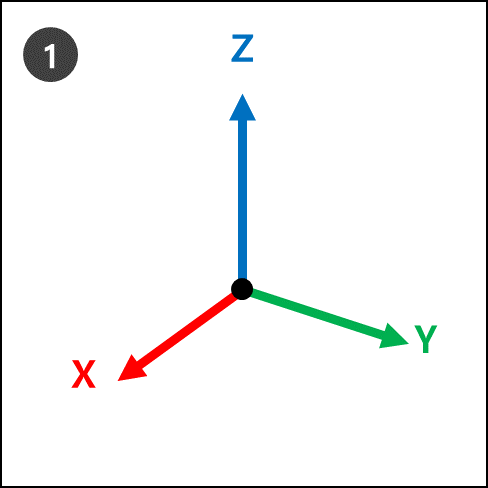
Supongamos que hay coordenadas (X, Y, Z).
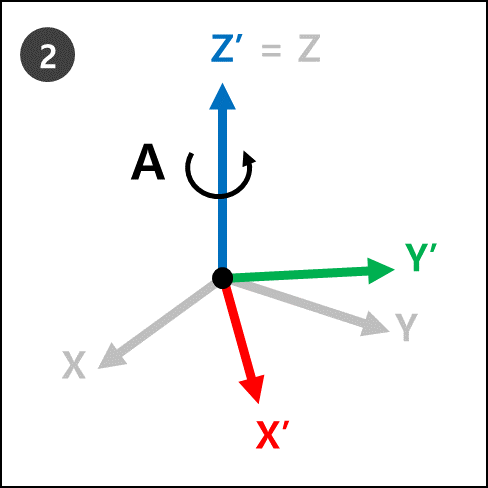
RZ: Gire un grado desde el eje Z.
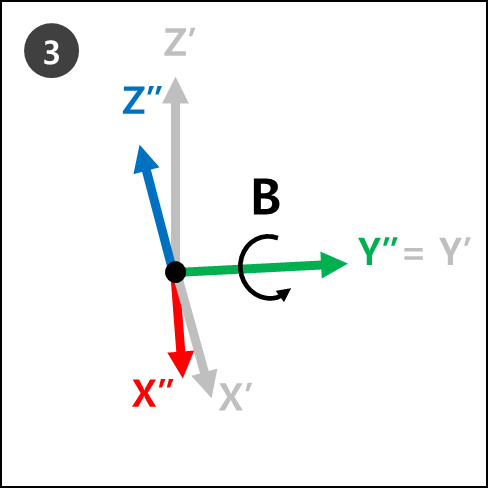
Ry : Gire B grados desde el nuevo eje Y (Y’) de las nuevas coordenadas (X’, Y’, Z’) del paso 2.
RZ : Gire B grados desde el nuevo eje Z (Z’’) de las nuevas coordenadas (X’, Y’’’, Z’’) del paso 3.
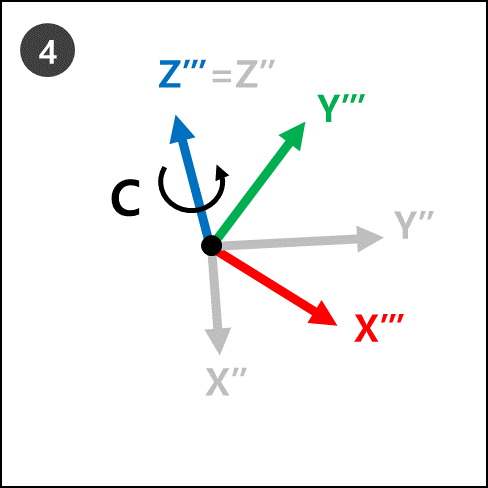
Las nuevas coordenadas (Z’’’’, Y’’’’, X’’’’ del paso 4 se refieren a la rotación actual del robot cuando se aplican los ángulos A, B y C. de Euler.
Esto se puede visualizar fácilmente con la mano derecha. Haga la siguiente postura con su mano derecha. Esto se denomina regla de la mano derecha, y hacer que el pulgar (eje X), el dedo índice (eje Y) y el dedo medio (eje Z) sean perpendiculares entre sí creará coordenadas consistentes en los ejes X, Y y Z.
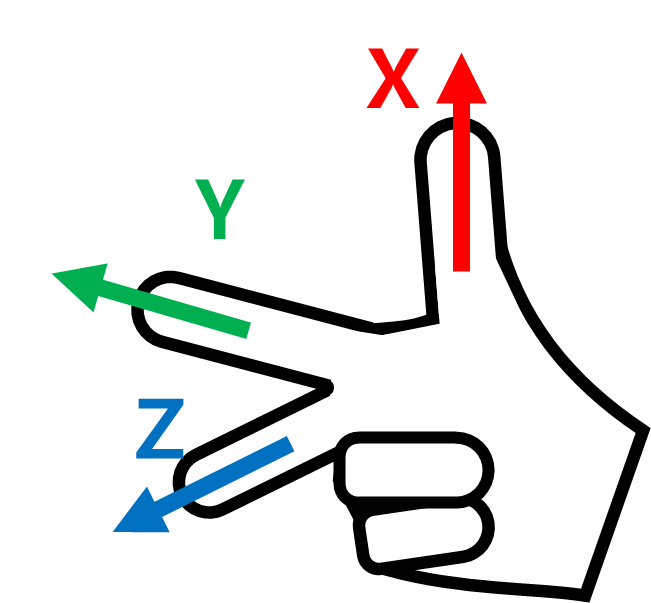
A continuación, haga la pose cartesiana de la regla de la derecha y haga rotaciones Rz, Ry y Rz en orden secuencial.
Rz: Gire el dedo medio (eje Z) en grados.
Ry: Gire el dedo índice (eje Y) B grados.
Rz: Gire el dedo medio (eje Z) C grados.
Nota
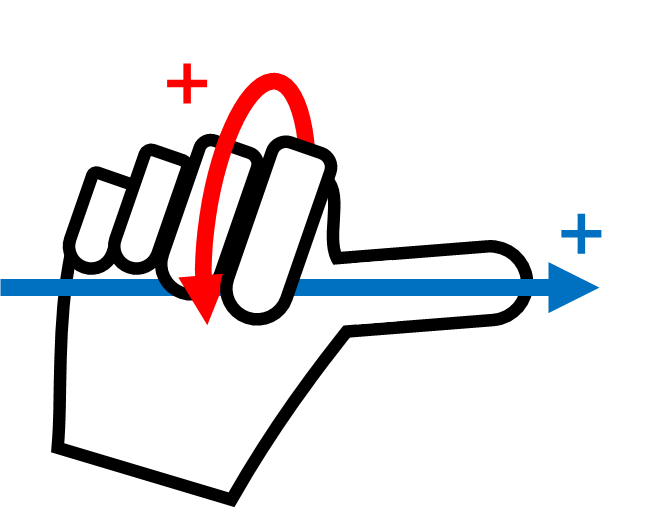
La dirección de giro + de A, B y C es la dirección de cuatro dedos excepto el pulgar, cuando el pulgar apunta a la dirección + y los cuatro dedos están apretados. Esto se llama la Ley del Tornillo en el sentido de las agujas del reloj.