Pruebe a forzar ejemplos de comandos
OPCIONAL NORMAL 20 MIN

Este ejemplo se crea en el Escritor de tareas. Este ejemplo se puede probar casi de la misma manera en el Generador de tareas.
Precaución
- Antes de probar la muestra, asegúrese de leer y seguir Precauciones de uso. Para obtener más información, consulte PARTE 1. Manual de seguridad.
- Este ejemplo requiere el archivo Task Writer creado en Pruebe ejemplos de comandos de cumplimiento.
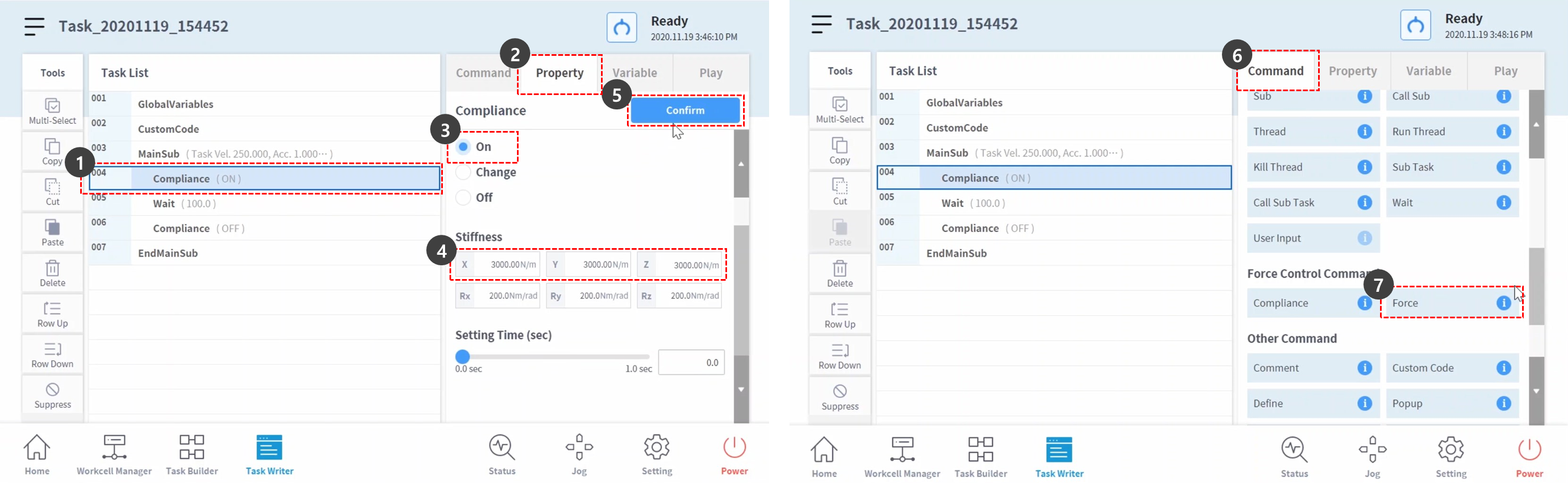
- Pruebe ejemplos de comandos de cumplimiento Abra el archivo Escritor de tareas creado y seleccione el comando de cumplimiento en la cuarta línea de la lista de tareas.
- Seleccione la ficha Propiedad.
- Establezca el modo de la siguiente manera: El modo activado activa el control de conformidad. El comando Forzar sólo está disponible cuando el control de conformidad está activado.
- Modo: Encendido
- Configure el valor de rigidez predeterminado como se indica a continuación:
- X, Y, Z: 3000 N/m (predeterminado)
- RX, Ry, Rz: 200 Nm/rad (predeterminado)
- Pulse el botón de confirmación.
- Seleccione la ficha Comando.
- Agregue un comando FORCE. Este comando está planificado para ser utilizado para habilitar el control de fuerza.
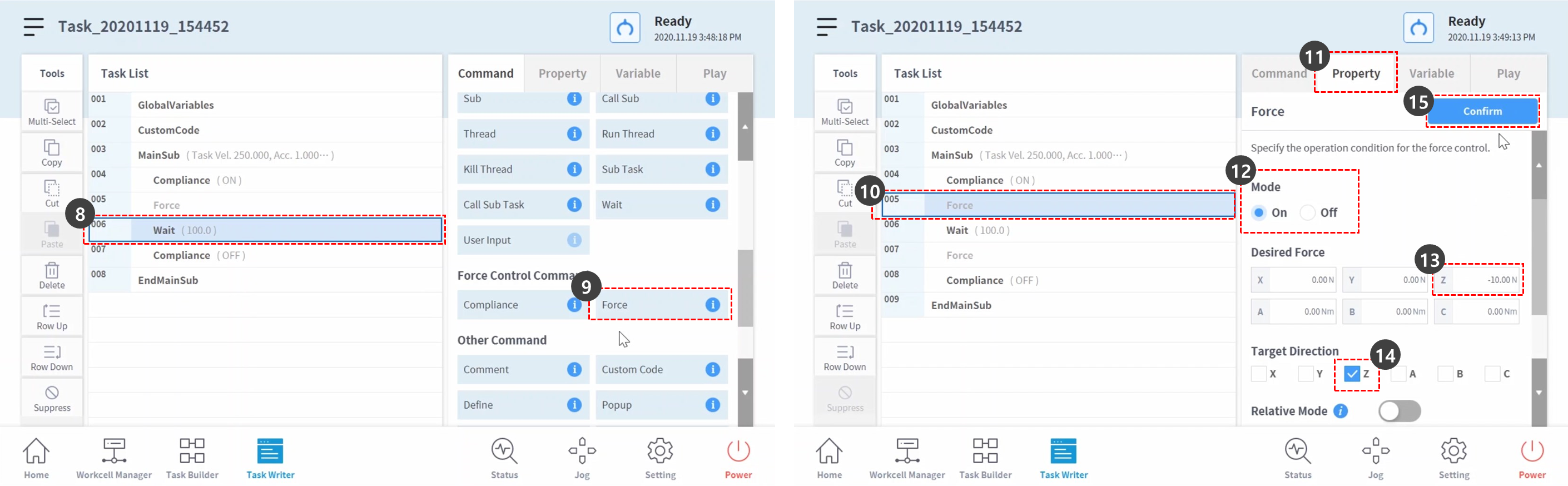
- Seleccione la sexta línea de la lista de tareas.
- Agregue un comando FORCE. Este comando está planificado para ser utilizado para deshabilitar el control de fuerza.
- Seleccione el comando FORCE en la quinta línea de la lista de tareas.
- Seleccione la ficha Propiedad.
- Establezca el modo de la siguiente manera: El modo activado activa el control de fuerza.
- Modo: Encendido
- Establezca la Fuerza deseada como se indica a continuación:
- X: 0 N (predeterminado)
- Y: 0 N (predeterminado)
- Z: -10 N
- RX, Ry, Rz: 200 Nm/rad (predeterminado)
- Compruebe sólo el eje Z en la dirección deseada.
- Pulse el botón de confirmación.
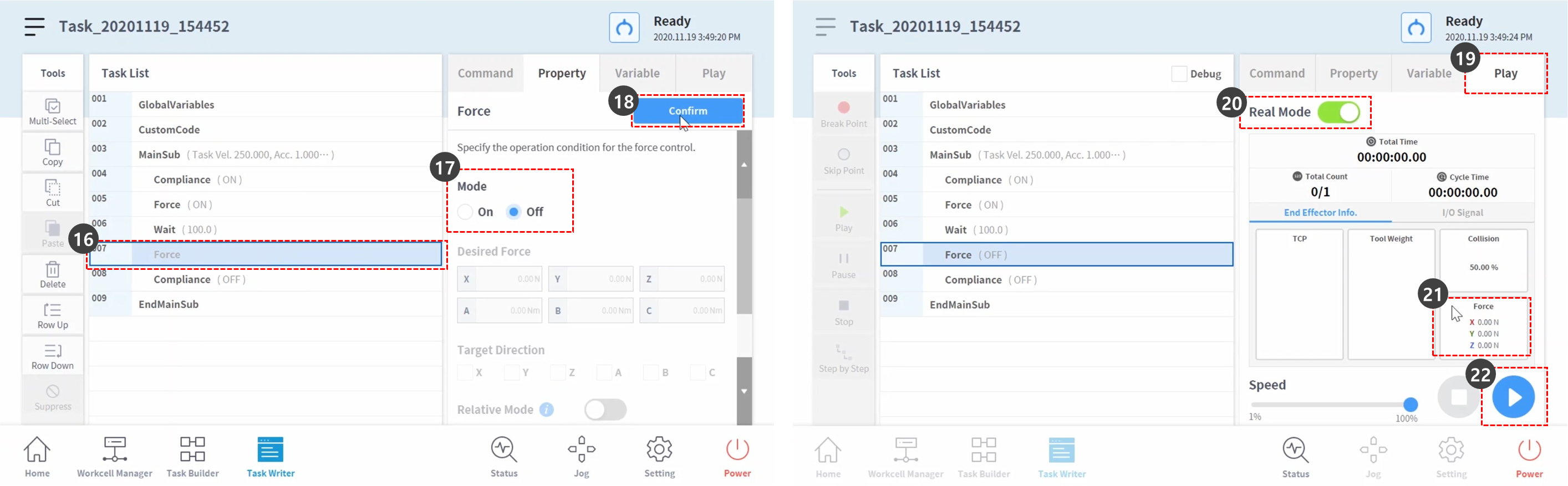
- Seleccione el comando Forzar en la séptima línea de la lista de tareas.
- Establezca el modo de la siguiente manera: El modo desactivado desactiva el control de fuerza.
- Modo: Apagado
- Pulse el botón de confirmación.
- Seleccione la ficha Reproducir.
- Active el botón de alternar Modo real.
- Una vez que el botón de alternar se activa, el botón se ilumina en verde.
- Compruebe si la fuerza TCP de cada eje es 0. Este valor de fuerza es el tamaño de la fuerza externa aplicada actualmente en el TCP del extremo del robot.
- Pulse el botón Reproducir.
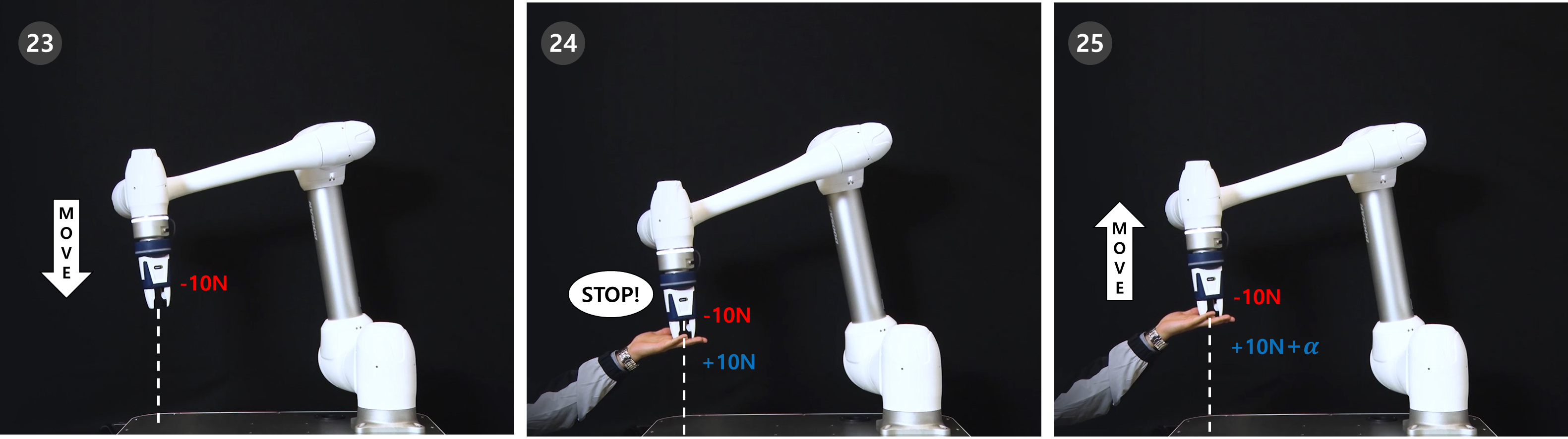
- -10N de fuerza se aplica en el extremo del robot TCP haciendo que el robot se mueva lentamente en la dirección del eje Z.
- El extremo del robot repele el movimiento del robot en la dirección del eje +Z, lo contrario a la dirección del movimiento del robot. Cuando la fuerza que mueve el robot y la fuerza que repele el movimiento del robot alcanzan un equilibrio, el robot mantendrá su posición como si se parara.
- Si se aplica una fuerza superior a +10N en el robot, éste cumplirá con la fuerza aplicada en el robot y se moverá en la dirección de la fuerza.