
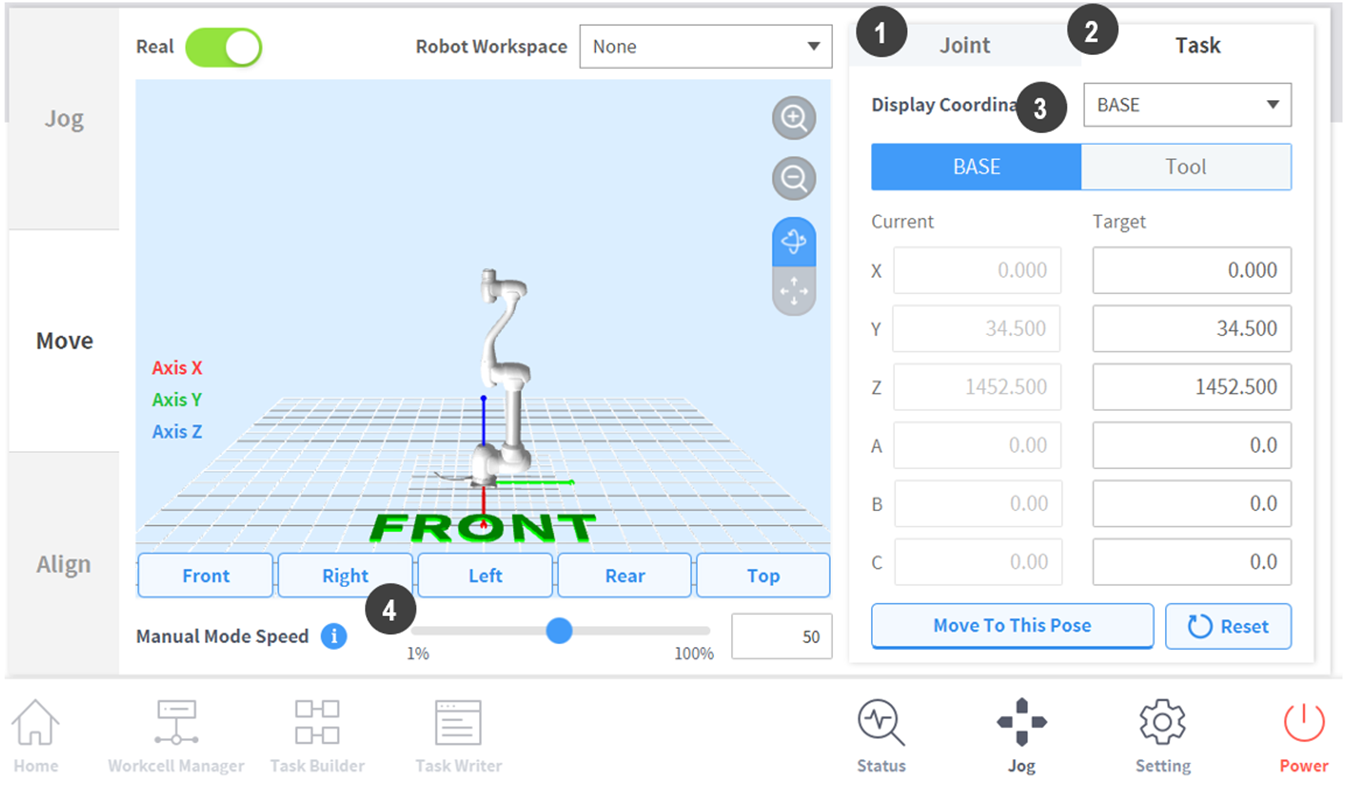
Pantalla de movimiento
Es posible mover el robot por el ángulo o las coordenadas objetivo en la pantalla Mover. Si se conocen las coordenadas hacia las que debe moverse el robot o si se debe mover al robot hacia coordenadas expresadas en comas decimales, es posible mover el robot introduciendo las coordenadas.
N.º | Elemento | Descripción |
|---|---|---|
1 | Joint | Configura la coordenada de referencia para usarla al mover el robot en modo avance. |
2 | Task | Configura el ángulo de referencia para usarlo al mover el robot en modo avance. |
3 | Reference Point Setting | Configura el punto de referencia para alinear las coordenadas de la tarea. Base: Configura las coordenadas de la tarea en función de la base de robot. Geográfica: Configura las coordenadas de la tarea basándose en las coordenadas geográficas establecidas. Herramienta: Configura las coordenadas de la tarea en función de la herramienta instalada en el extremo de 6 ejes del robot. |
4 | Manual Mode Speed | Configura la velocidad de movimiento del robot en modo manual. La velocidad se puede ajustar arrastrando el puntero deslizante. Si el puntero deslizante se encuentra en 100 %, la máxima velocidad correspondiente de la articulación en la pestaña Mover es 30°/s, y la velocidad de tarea máxima es 250 mm/s. La velocidad influye en la velocidad de operación del botón y el avance. |