
Jog+
Usar Jog+ le permite usar simultáneamente la función Jog mientras realiza diferentes trabajos. Esto se puede utilizar cuando se requiere un movimiento preciso hacia el punto de destino durante el aprendizaje del robot.
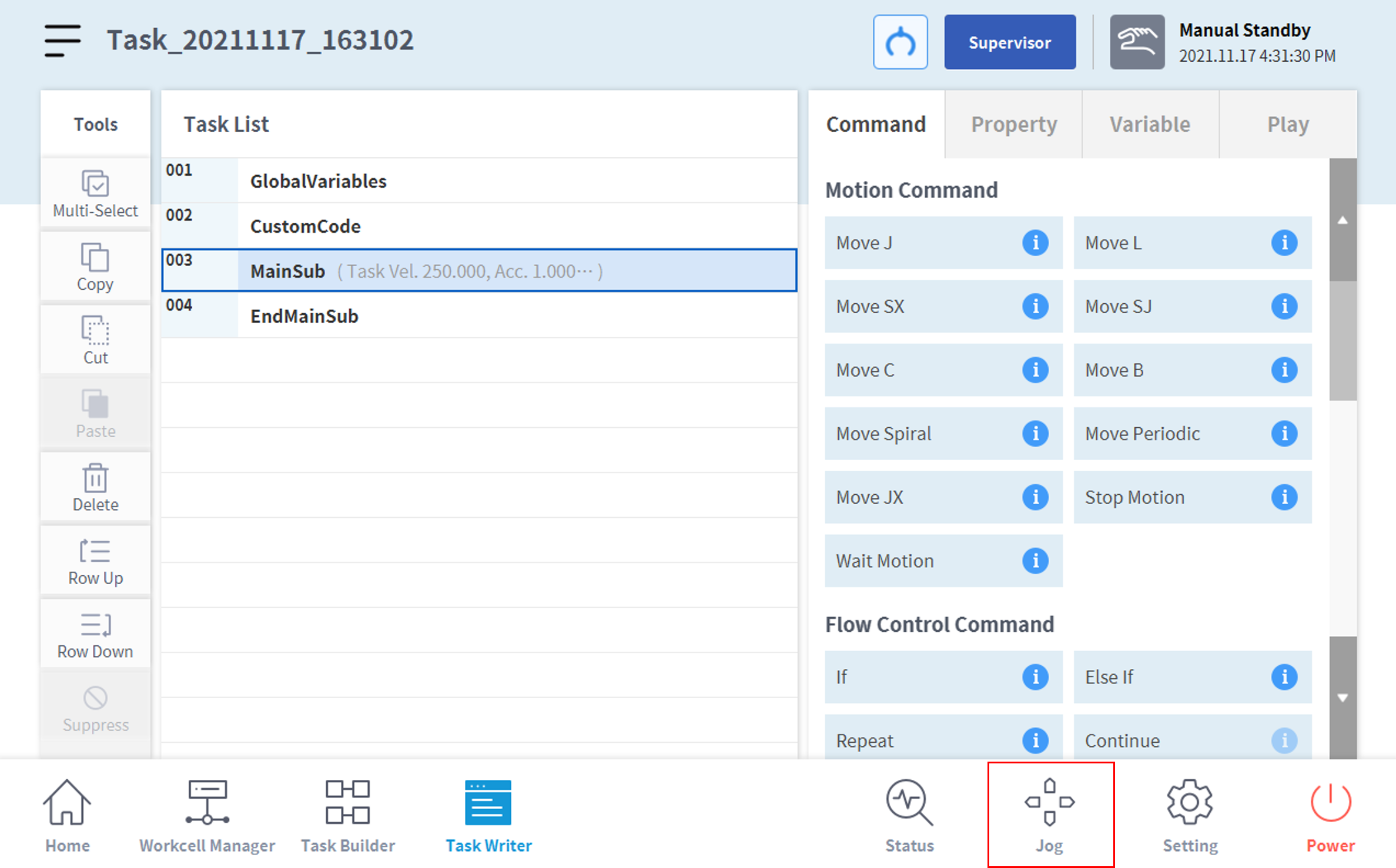
Jog Plus se puede activar de las siguientes formas.
- Presione el botón de avance lento durante más de 1 segundo en el menú principal en la parte inferior de la pantalla.
- Se activa la pantalla Jog Plus.
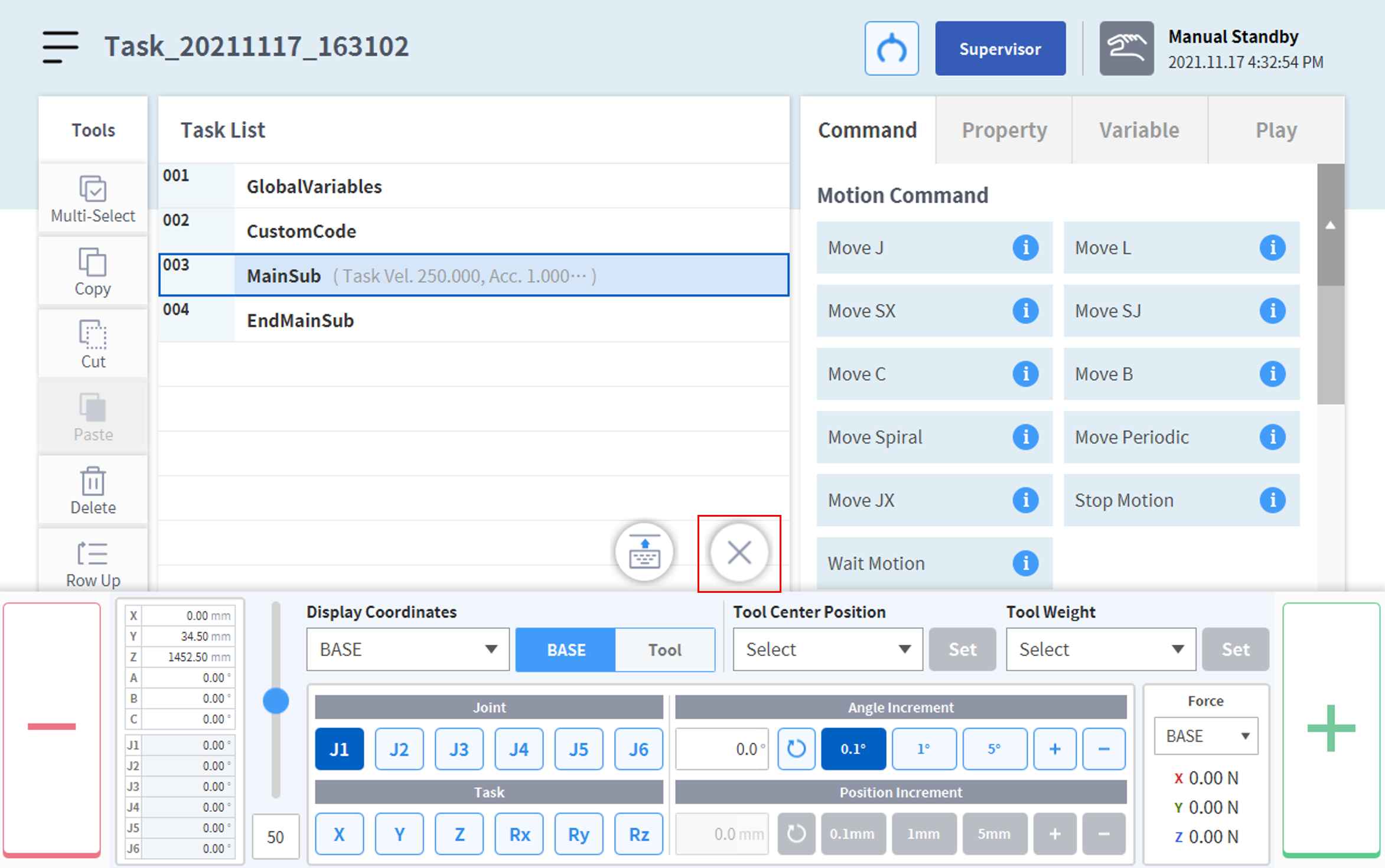
Jog Plus se puede desactivar presionando el botón "X"
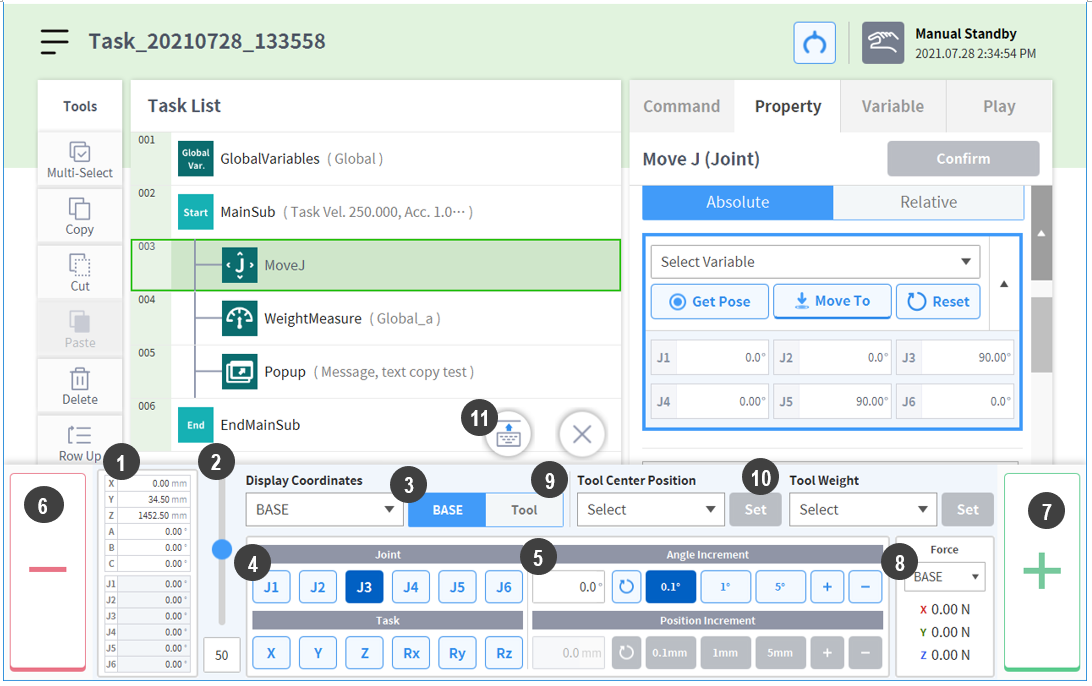
N.º | Elemento | Descripción |
|---|---|---|
1 | Current robot pose | Muestra la postura del robot basada en las coordenadas de visualización establecidas. |
2 | Manual Mode Speed | Configura la velocidad de movimiento del robot en modo manual. La velocidad se puede ajustar arrastrando el puntero deslizante. Si el puntero deslizante se encuentra en 100 %, la máxima velocidad correspondiente de la articulación en la pestaña Avance es 30°/s, y la velocidad de tarea máxima es 250 mm/s. Esta velocidad influye sobre la velocidad controlada por los botones de avance y de movimiento. |
3 | Reference Point Setting | Configura el punto de referencia para alinear las coordenadas de la tarea. Base: Configura las coordenadas de la tarea en función de la base de robot. Geográfica: Configura las coordenadas de la tarea basándose en las coordenadas geográficas establecidas. Herramienta: Configura las coordenadas de la tarea en función de la herramienta instalada en el extremo de 6 ejes del robot. |
4 | Select Axis | Selecciona el eje para mover. Pestaña Articulación: Seleccione un eje entre J1 - J6. Pestaña Tarea: Seleccione un eje entre X - Rz. |
5 | Select Increment | Introduce un número en relación a cuánto se moverá el eje seleccionado. |
6 | Move – Button | Si se mantiene pulsado el botón, el eje seleccionado se mueve en la dirección - de acuerdo con la ubicación del incremento. |
7 | Move – Button | Si se mantiene pulsado el botón, el eje seleccionado se mueve en la dirección + de acuerdo con la ubicación del incremento. |
8 | Force Monitoring | Muestra la fuerza externa que ocurre en función del sistema de coordenadas seleccionado. |
9 | TCP Setting: | Establece el TCP. |
10 | Tool Weight Indicator | Establece el peso de la herramienta. |
11 | Change Jog+ location | Cambia la ubicación de Jog+ a la parte superior o inferior de la pantalla. |