Habilidad: Pruebe a recoger y colocar muestras
OPCIONAL NORMAL 20 MIN
Este ejemplo se crea en el Generador de tareas. El escritor de tareas no admite la función de habilidad.
Precaución
- Antes de probar la muestra, asegúrese de leer y seguir Precauciones de uso. Para obtener más información, consulte PARTE 1. Manual de seguridad.
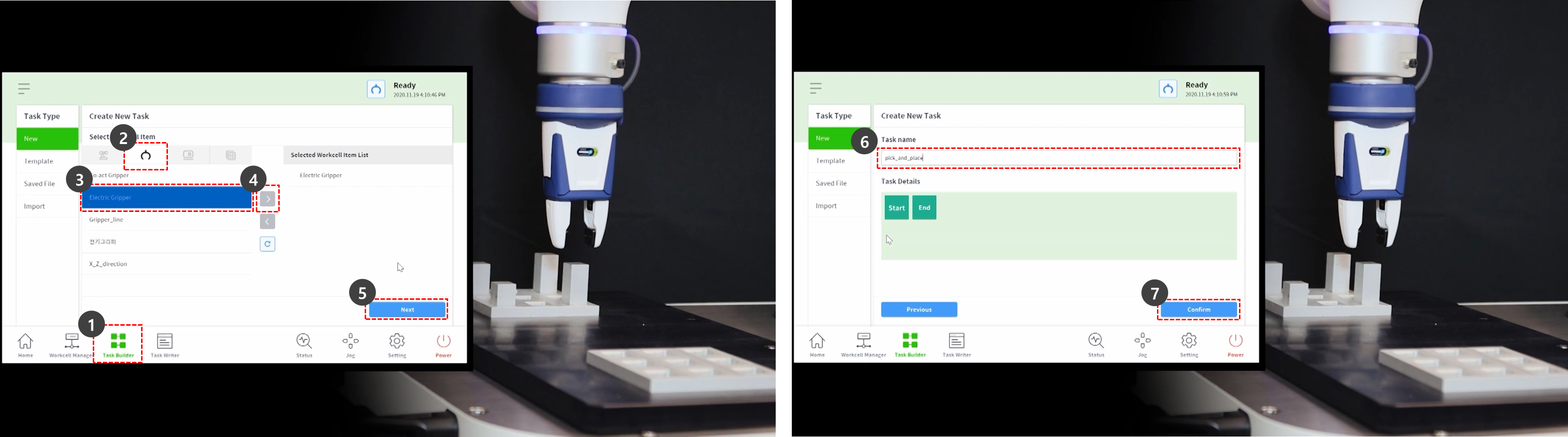
- Seleccione el Generador de tareas en el menú inferior.
- Seleccione el icono Seleccionar elemento de celda de trabajo > Cuentagotas.
- Seleccione la pinza registrada como elemento de celda de trabajo. Esta muestra no se puede probar si no hay ninguna pinza registrada como elemento de celda de trabajo.
- Pulse el botón > para registrar el elemento de celda de trabajo como el elemento de celda de trabajo seleccionado.
- Pulse el botón Siguiente.
- Introduzca el nombre de la tarea.
- Pulse Confirmar.
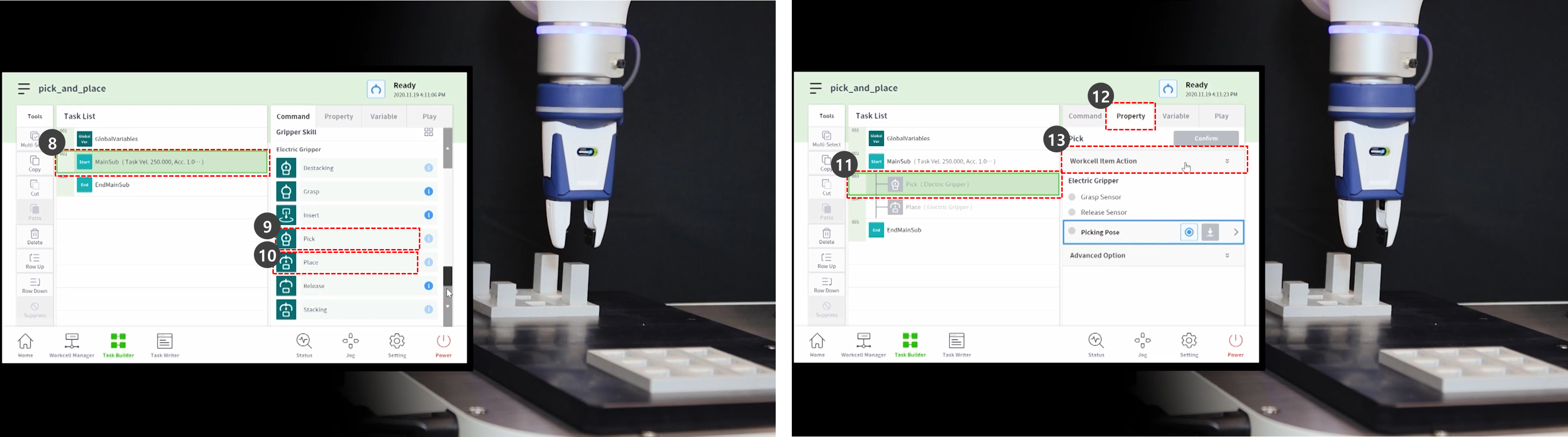
- Seleccione el comando MainSub en la segunda línea de la lista de tareas. Se agrega un nuevo comando a la siguiente línea de la línea seleccionada.
- Agregue el comando Pick skill.
- Agregue el comando Colocar habilidad.
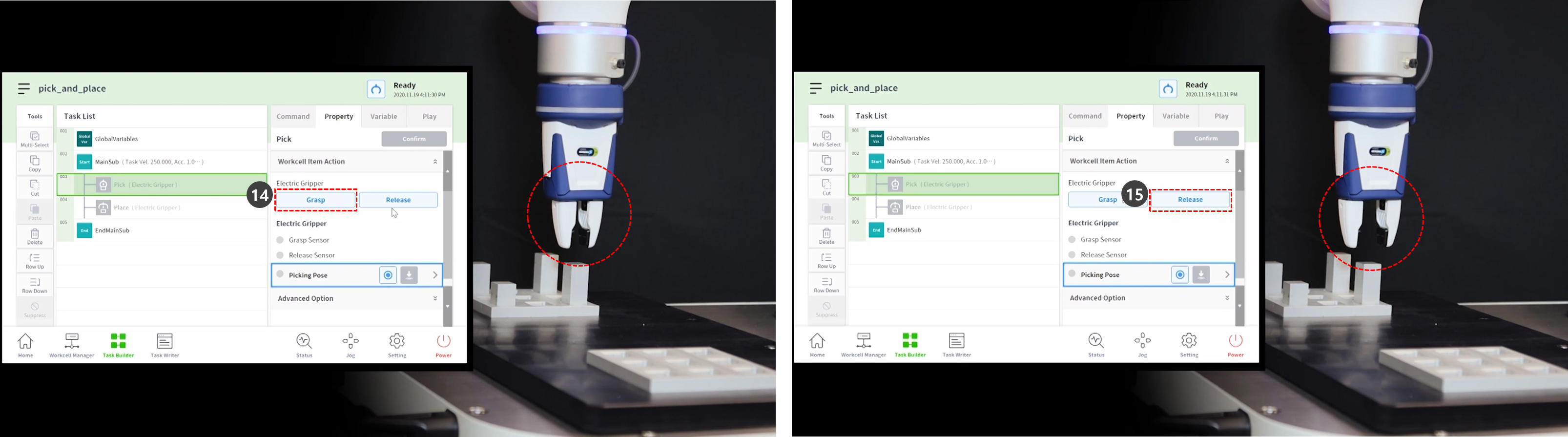
- Seleccione el comando Elegir de la tercera línea de la lista de tareas.
- Seleccione la ficha Propiedad.
- Pulse la acción del elemento de la celda de trabajo para expandir el menú. Si se selecciona el elemento de la celda de trabajo de la pinza, se puede probar la acción de la pinza durante la acción del elemento de la celda de trabajo.
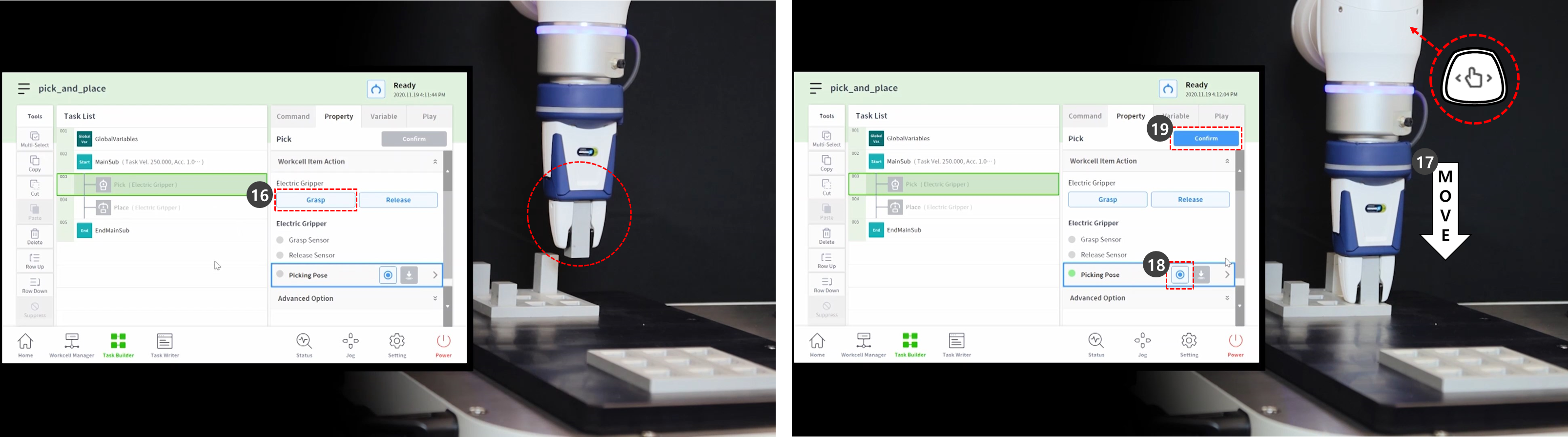
- Para probar la pinza, pulse el botón de agarre y realice un movimiento de agarre.
- Para probar la pinza, pulse el botón de liberación y realice el movimiento de liberación.
- En caso de piezas ligeras, colocar la pieza en la pinza y pulsar el botón de agarre para que el robot sujete la pieza. Realizar la enseñanza mientras la pinza sujeta una pieza puede ayudar a establecer una posición precisa.
- Sin embargo, no es obligatorio que el robot sujete una pieza durante la enseñanza, sino un ejemplo.
- En el caso de piezas pesadas, pueden producirse situaciones peligrosas, ya que la pinza puede perder la pieza.
- En el caso de piezas pesadas, el peso de la herramienta de los ajustes de la herramienta debe incluir el peso de la herramienta y el peso de la pieza.
- Utilice la enseñanza directa para mover el robot al punto en el que se realizará la selección.
- Mantenga pulsado el botón de guía manual de la cabina para mover el robot.
- Pulse el botón Obtener pose de la posición de recogida.
- Pulse el botón de confirmación.
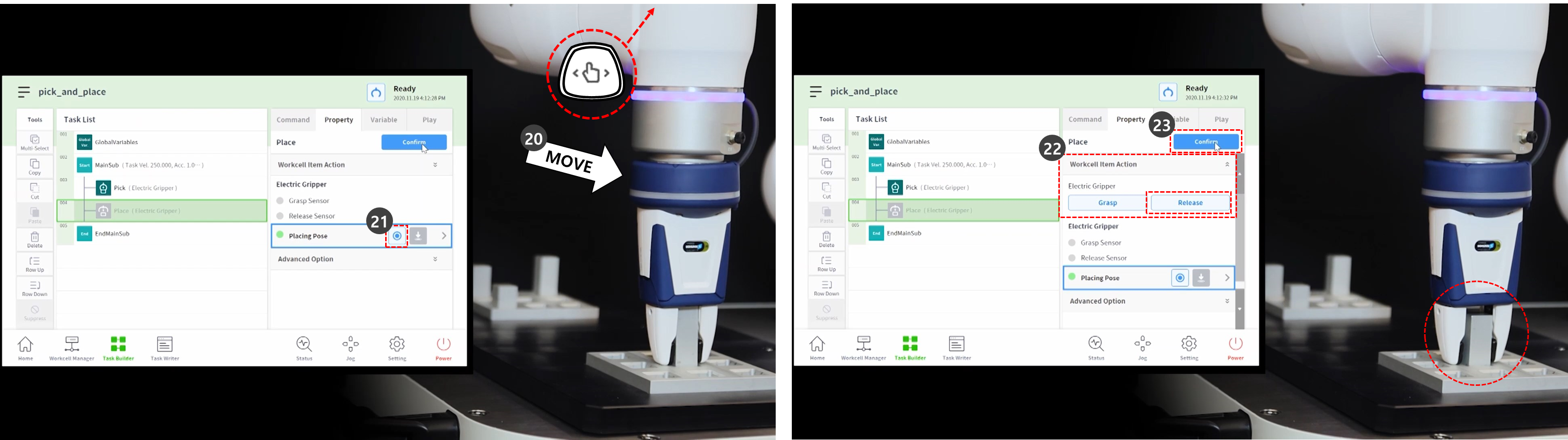
- Utilice la enseñanza directa para mover el robot hasta el punto en el que se realizará el lugar.
- Pulse el botón Obtener pose de la posición de colocación.
- Para soltar la pieza de trabajo de la pinza, pulsar el botón de liberación.
- Pulse el botón de confirmación.
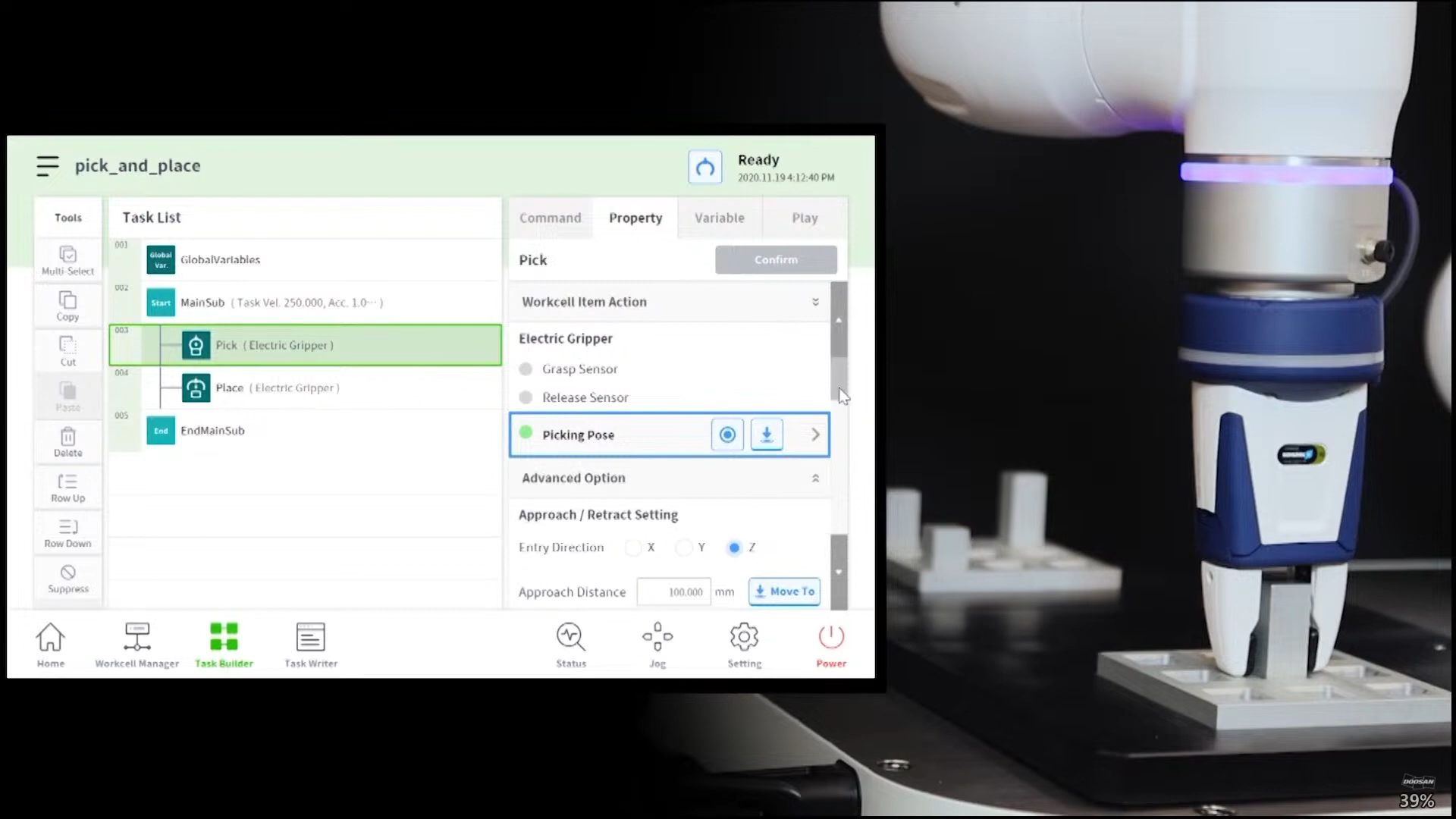
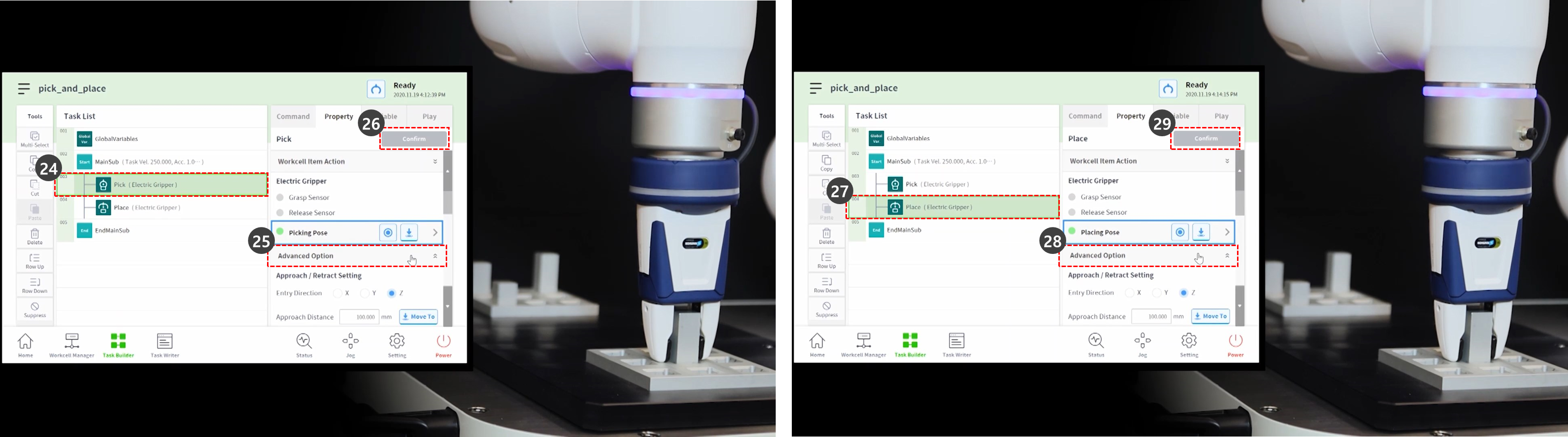
- Para establecer la configuración detallada de los comandos de habilidades de selección y colocación, seleccione el comando Elegir en la tercera línea de la lista de tareas.
- Pulse la opción Avanzado para ampliar el menú y establecer lo siguiente: Utilice los valores predeterminados para los elementos que no se describen a continuación.
- Dirección de entrada: Eje Z.
- Establece la dirección para introducir la posición de selección.
- Distancia de aproximación: 100 mm
- Establece la distancia justo antes de que el robot se acerque a la posición de selección. Asegura una distancia de aproximación suficiente.
- Distancia de retracción: 100 mm
- Establece la distancia después de que el robot se retraiga en la dirección establecida desde la posición de selección. Asegura una distancia de retracción suficiente.
- Velocidad de aproximación: 100 mm/s
- Establece la velocidad de aproximación inferior al valor predeterminado cuando el robot se acerca a un objeto.
- Control de conformidad: Activado (verde)
- Contacto de detección: Activado (verde)
- Permite el control de conformidad y las funciones de detección de contactos.
- Fuerza de contacto: 10N
- Tolerancia de contacto: 10 mm
- Fuerza: 15N
- Desplazamiento de rasguño: 2mm
- Suelte el Gripper antes de recoger: Activado (verde)
- Establece la pinza en el estado Emisión antes de acercarse a la ubicación de recogida.
- Peso de la herramienta: Ninguno
- Si la pieza no es ligera, se deben sumar el peso de la pieza y el peso de la herramienta, se deben añadir como un elemento de la célula de trabajo de peso de la herramienta y se deben seleccionar.
- Dirección de entrada: Eje Z.
- Pulse el botón de confirmación.
- Seleccione el comando Colocar en la cuarta línea de la lista de tareas.
- Pulse la opción Avanzado para ampliar el menú y establecer lo siguiente: Utilice los valores predeterminados para los elementos que no se describen a continuación.
- Dirección de entrada: Eje Z.
- Distancia de aproximación: 100 mm
- Distancia de retracción: 100 mm
- Velocidad de aproximación: 100 mm/s
- Control de conformidad: Activado (verde)
- Contacto de detección: Activado (verde)
- Permite el control de conformidad y las funciones de detección de contactos.
- Fuerza de contacto: 10N
- Tolerancia de contacto: 10 mm
- Fuerza: 15N
- Peso de la herramienta: Ninguno
- Pulse el botón de confirmación.
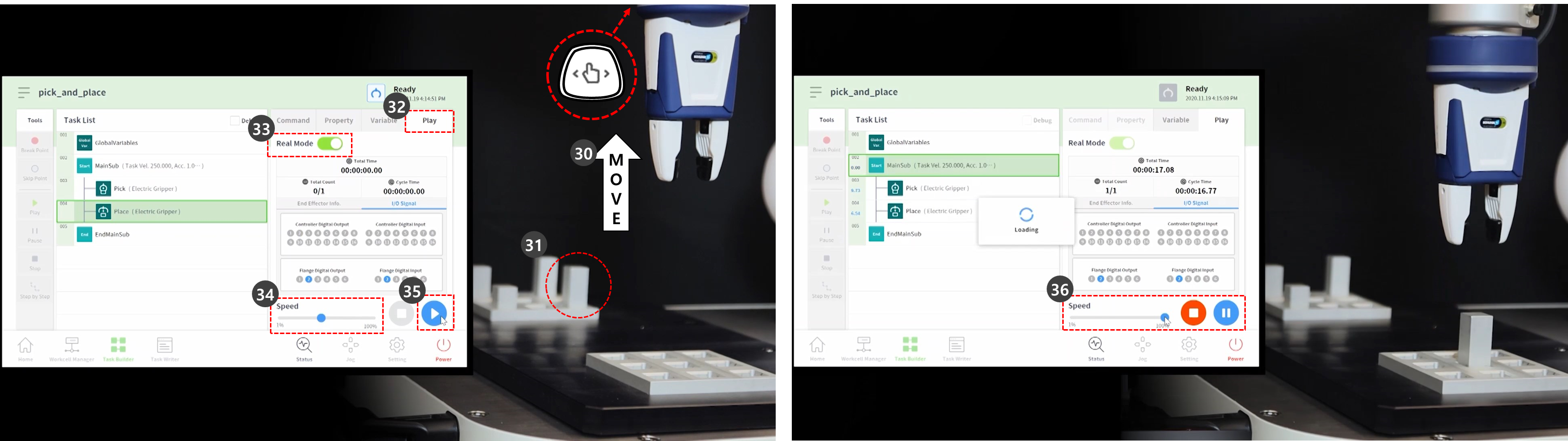
- Utilice la enseñanza directa para mover el robot hasta el punto en el que se iniciará la recogida y colocación.
- Mover una pieza a la posición de recogida.
- Seleccione la ficha Reproducir.
- Active el botón de alternar Modo real.
- Ajuste la barra deslizante de velocidad al 10-30%.
- Esta barra deslizante de velocidad ajusta la velocidad establecida de todos los comandos al % seleccionado.
- Cuando se ejecuta una tarea por primera vez después de su creación, ejecutarla a baja velocidad puede evitar riesgos inesperados.
- Pulse el botón Reproducir.
- Si la tarea se completa sin problemas, vuelva a ajustar la velocidad al valor predeterminado, 100%, y vuelva a realizar la prueba.