Las formas de Límite de espacio / Zona se establecen de acuerdo a lo siguiente:
Elemento
Descripción
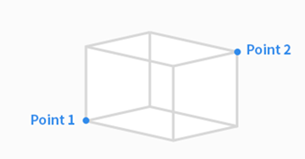
Cuboid
La forma de Límite de espacio / Zona se establece como cuboide.
Introduzca el punto final inferior (Punto 1) y el punto final superior (Punto 2) del cuboide y toque el botón Save Pose.
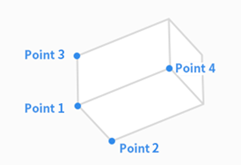
Tilted Cuboid
La forma de Límite de espacio / Zona se establece como cuboide inclinado.
Ingrese el punto de referencia (Punto 1), el punto final del eje x (Punto 2), el punto final del eje y (Punto 3), el punto final del eje z (Punto 4) del cuboide inclinado y toque el botón Save Pose.
Las tres líneas (Punto 1-Punto 2, Punto 1-Punto 3, Punto 1-Punto 4) deben cruzarse en ángulo recto. (una desviación de +/- 5 grados es aceptable)
Usar el movimiento restringido de «bloqueo de la superficie» y «bloqueo del eje» en el Punto 1 permitirá que el robot obtenga el Punto 2, Punto 3 y Punto 4 más fácilmente.
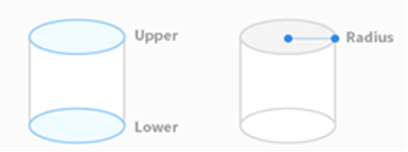
Cylinder
La forma de Límite de espacio / Zona se establece como cilíndrica.
Ingrese el punto a una distancia radial, el punto del plano superior y el punto del plano inferior del cilindro, y toque el botón Save Pose.
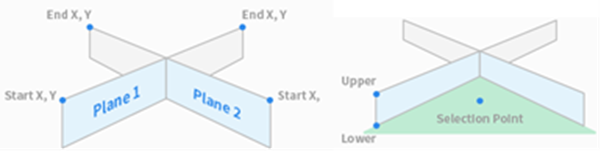
Multi-plane Box
La forma de Límite de espacio / Zona se establece como caja multiplano.
Configure la altura de la parte superior e inferior de la caja multiplano y presione el botón Add Pose para agregar un plano.
Seleccione las coordenadas X e Y para configurar la dirección del plano y toque el botón Save Pose. Se pueden configurar hasta seis planos.
Establezca las coordenadas de los puntos del área a configurar.
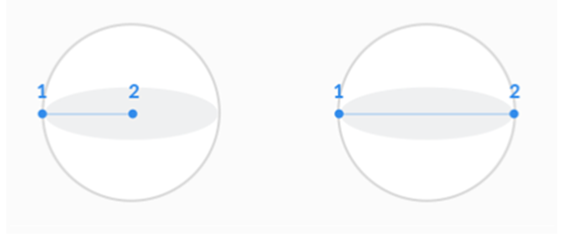
Sphere
La forma de Límite de espacio / Zona se establece como esfera.
Para configurar el radio, ingrese las posiciones del punto del centro y el punto final de la esfera y, para configurar el diámetro, ingrese los dos puntos finales de la esfera y toque el botón Save Pose
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.