
Configuración del Waypoint
Para configurar el waypoint de un comando, siga estas indicaciones:
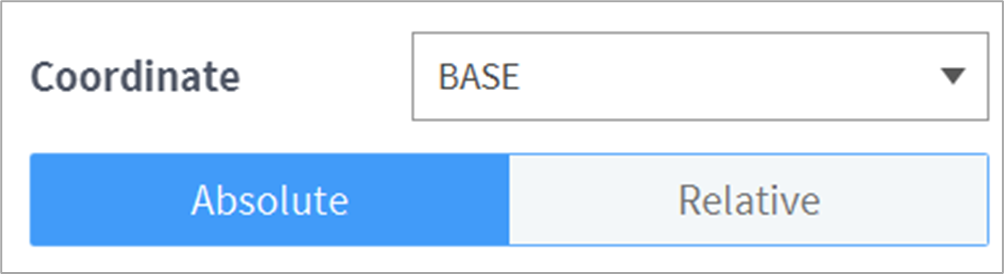
- Seleccione el tipo (Absoluto, Relativo) de la coordenada de referencia y el valor de referencia.
- Use la función de avance o bien lleve a cabo una enseñanza directa para mover el robot a la posición que desea.
- Toque el botón "Guardar postura" para guardar la posición de la herramienta del robot.
- Si es necesario, defina una variable usando GlobalVariables o el comando Definir.
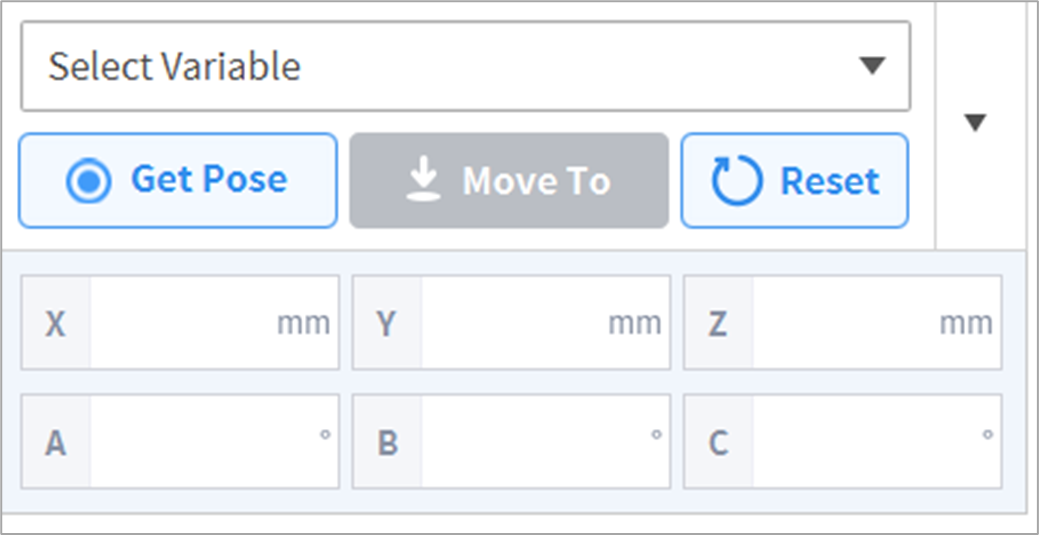
- Si es necesario, defina una variable usando GlobalVariables o el comando Definir.