Configuración del control remoto
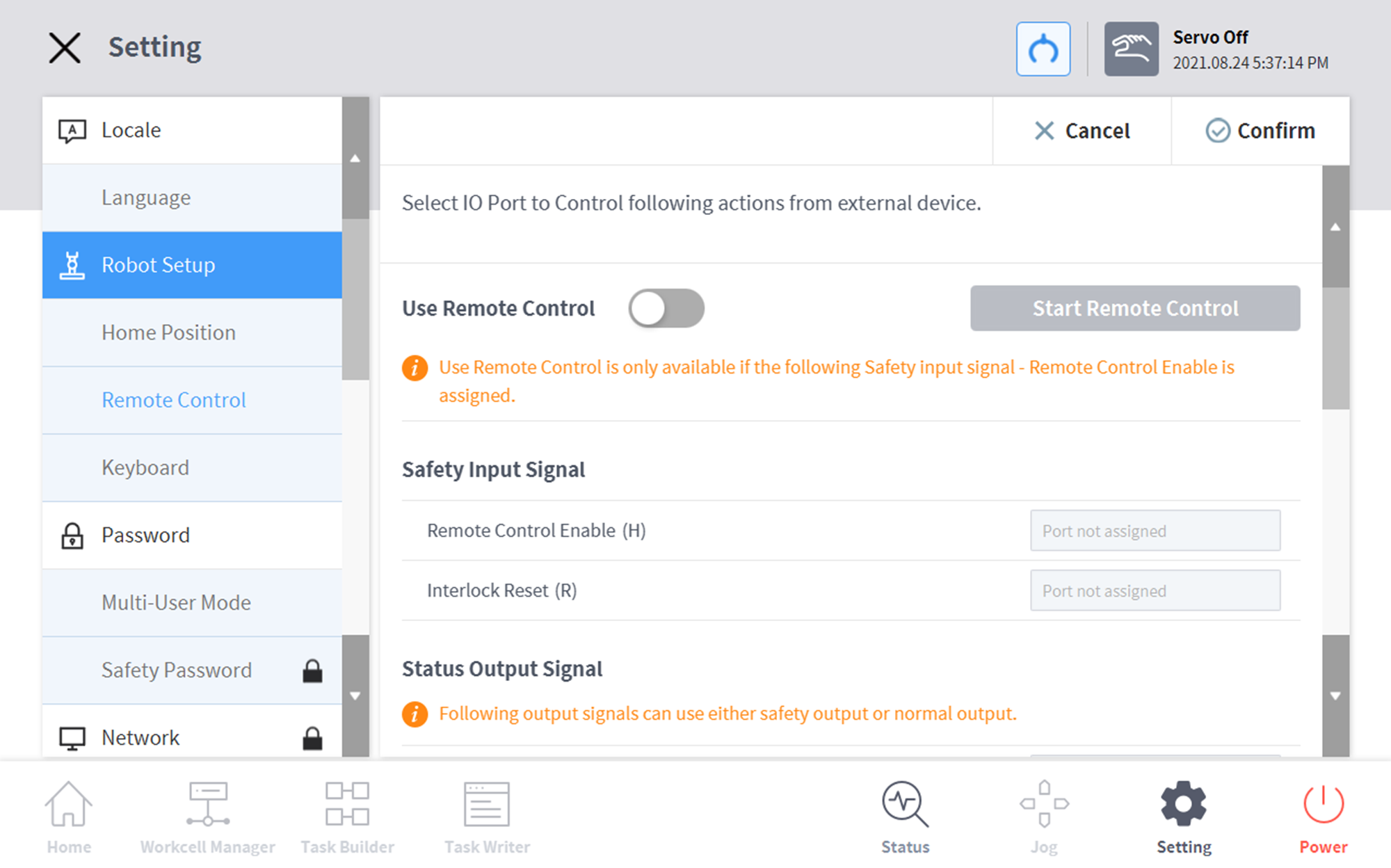
- Seleccione el menú Control remoto en el menú Configuración > Configuración del robot.
- Aparece la información de configuración actual en la ventana de administración de ajustes.
- Active el botón Usar control remoto.
- Si el sistema se reinicia con el control remoto activado, arranca en modo de control remoto.
- Introduzca los valores predeterminados de señal de salida, señal de entrada y carga de tarea.
- Si la señal de entrada no está configurada, no se pueden realizar las configuraciones. En Workcell Manager > E/S de seguridad > pestaña Entrada, Editar > seleccione Puerto > configure Habilitar control remoto(H).
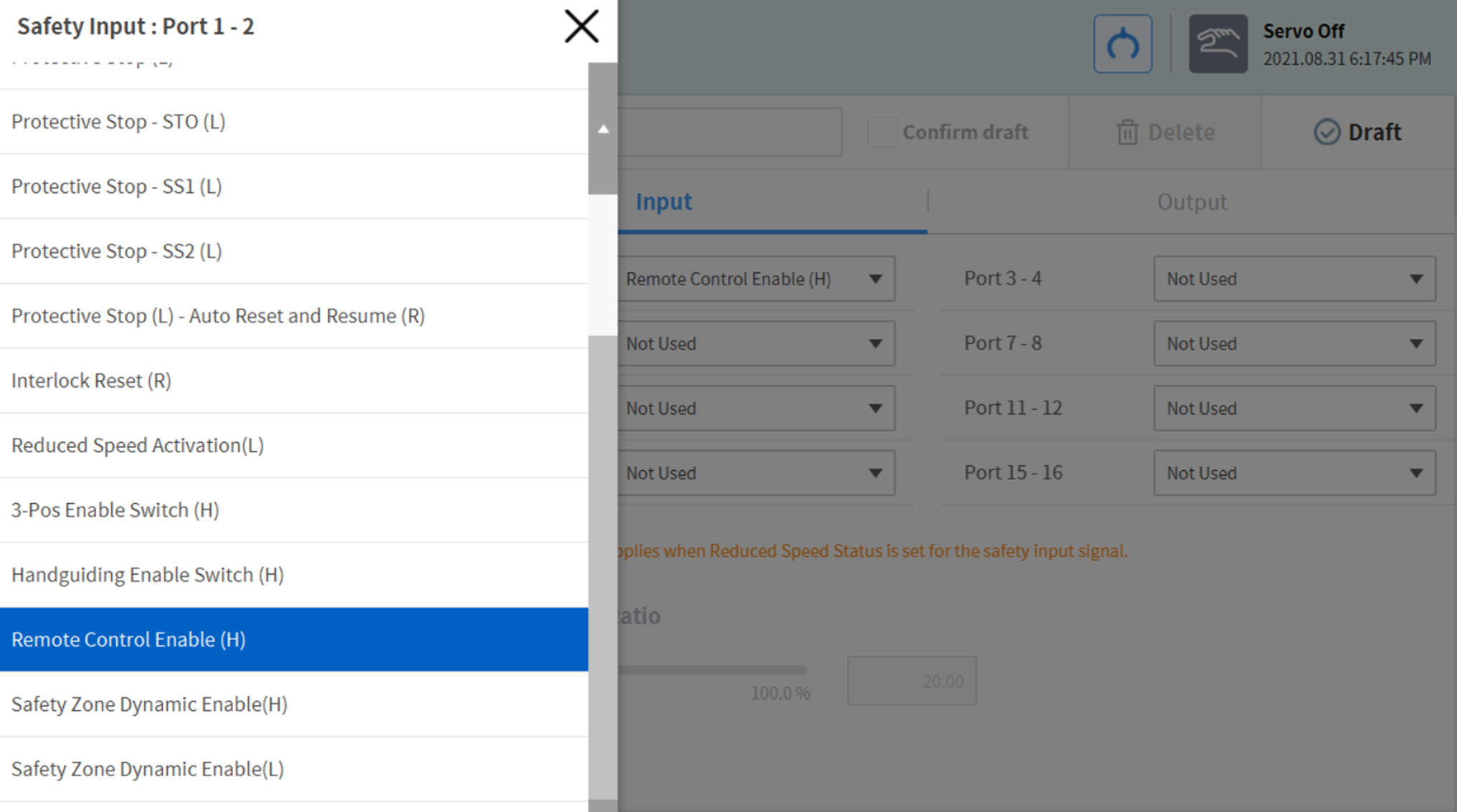
- Si la señal de entrada no está configurada, no se pueden realizar las configuraciones. En Workcell Manager > E/S de seguridad > pestaña Entrada, Editar > seleccione Puerto > configure Habilitar control remoto(H).
- Toque el botón Confirmar al finalizar.
- De este modo se completa la configuración del entorno para el control remoto.
- Para habilitar el control remoto usando un dispositivo externo, toque el botón “Encender control remoto” para activar el modo de control remoto.
- Se muestra la información sobre las tareas que se deben ejecutar desde el dispositivo externo.
- Las entradas de movimiento desde el dispositivo externo solo pueden ejecutarse si aparece una señal de color verde en el botón “Habilitar control remoto”.
- Si aparece una señal de color rojo en el botón Habilitar control remoto, introduzca una señal de habilitación desde el dispositivo externo.
Nota
- Si se produce una parada de emergencia o una parada de protección en el modo de control remoto, se maneja de la siguiente forma:
- Parada de emergencia: Aparece un mensaje emergente de parada. Después de eliminar la causa de la parada de emergencia, jale o gire el interruptor de parada de emergencia para reanudar; la ventana emergente se cerrará de forma automática.
- Parada de protección que provoca la transición al estado de servo apagado: Aparece un mensaje emergente rojo de parada de protección. Si se introduce la señal de servo encendido después de eliminar la causa de la parada de protección, las unidades servo del robot se encienden y la ventana emergente se cierra de forma automática.
- Parada de protección que provoca la transición al estado interrumpido: Aparece un mensaje emergente amarillo de parada de protección. Si la señal Restablecer enclavamiento se introduce después de eliminar la causa de la parada de protección, el estado del robot cambia a estado de espera normal – Espera manual, Espera automática o Espera HGC.
Para las violaciones a la seguridad donde no es posible eliminar su causa sin mover el robot, se puede utilizar Escape de compresión por cabina. - Para obtener detalles sobre el estado de cada modo, consulte “ Color de LED de estado y de brida para cada modo”.
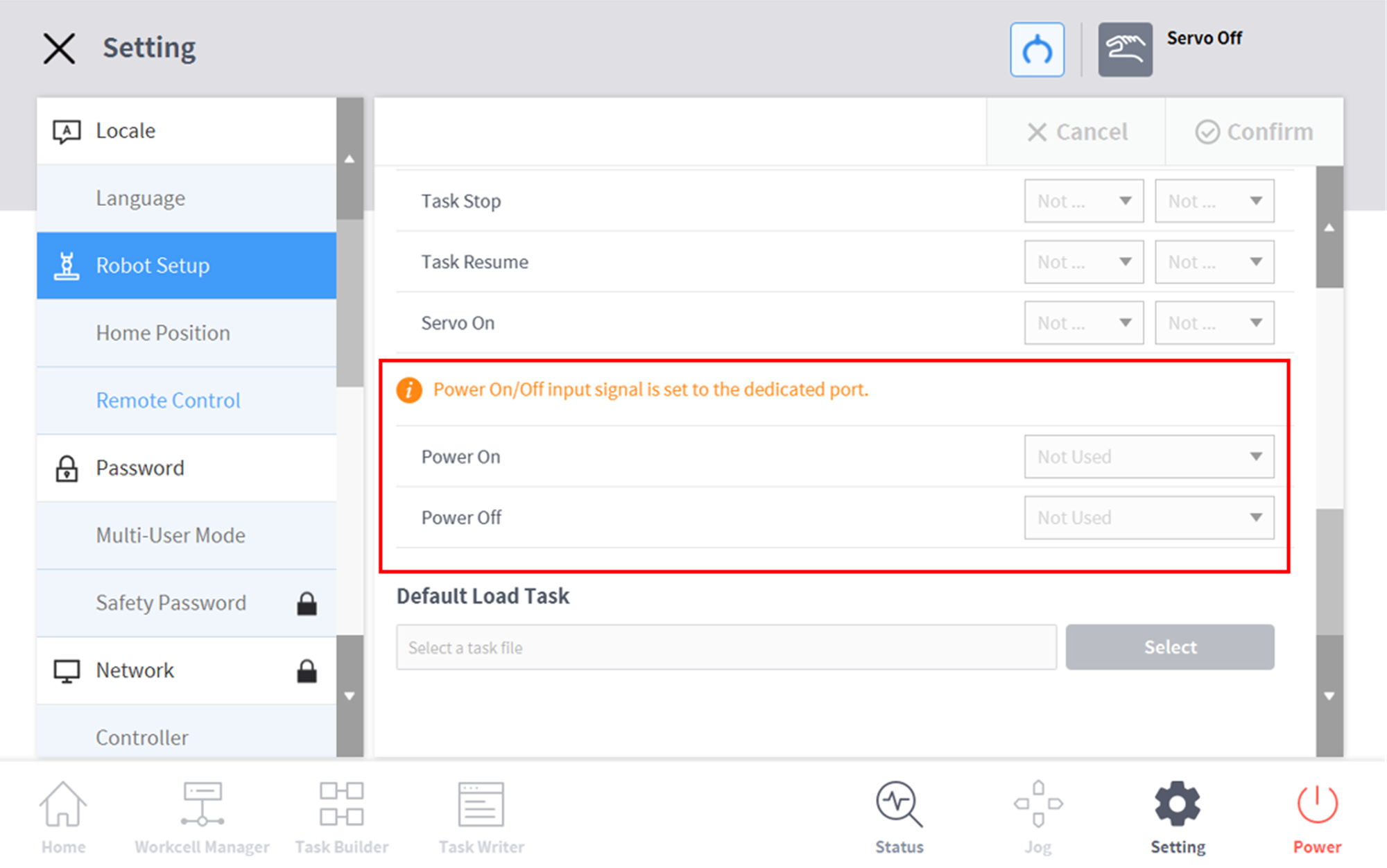
- Es posible encender/apagar la alimentación del robot mediante la configuración del control remoto.
- Toque el botón Ajustes en el menú principal y seleccione Control remoto en Configuración del robot.
- Seleccione el puerto de entrada dedicado para el control remoto para usar la función Encendido o Apagado.