
Configuración de Smart Pendant
Precaución
Configuración de Smart Pendant es una pantalla para configurar las funciones que se ofrecen como opciones de la serie A.
- Seleccione el menú Control remoto en el menú Configuración de Smart Pendant.
- Aparece la información de configuración actual en la ventana de administración de ajustes.
- Active el botón de alternancia Usar Smart Pendant.
- Si el sistema se reinicia con Usar Smart Pendant activado, arranca en modo de control remoto.
- Seleccione tarea
- Es la tarea que se usará en el modo de Smart Pendant.
- Toque el botón Confirmar y haga clic en el botón Iniciar Smart Pendant.
- Se muestra la pantalla del tablero de Smart Pendant y se puede acceder a los comandos que usan Smart Pendant.
- Cuando se inicia el modo de Smart Pendant desde Windows, la pantalla de teach pendant también cambia a la pantalla de Smart Pendant.
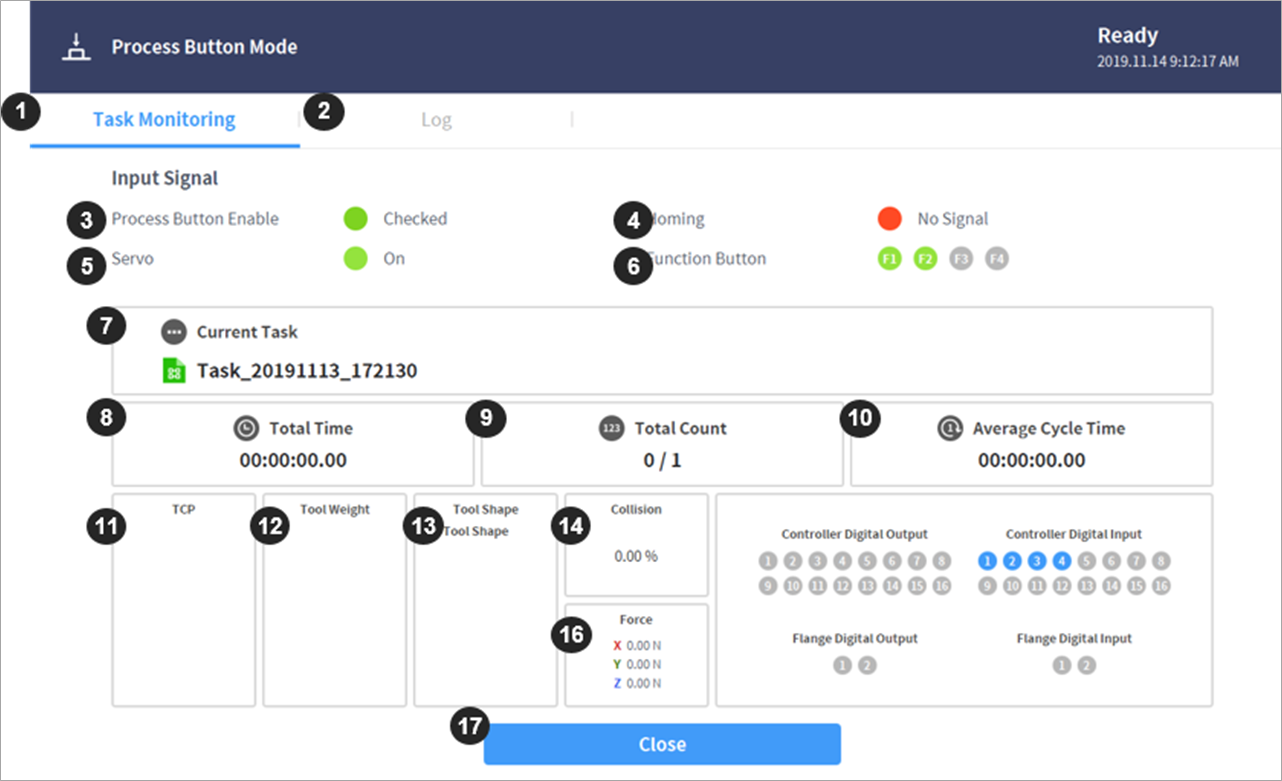
N.º | Elemento | Descripción |
1 | Task Monitoring Tab | Es la pestaña que muestra la información de monitoreo necesaria para ejecutar la señal de entrada y Tarea de Smart Pendant. |
2 | Log Tab | Es la pestaña que muestra los mensajes de registro recopilados durante la ejecución de la tarea. |
3 | Smart Pendant Enable Signal | Cuando el Smart Pendant está conectado al controlador, se muestra como Revisado (verde). |
4 | Homming Signal | Cuando se presiona el botón de punto cero del Smart Pendant, el indicador se muestra como Revisado (verde). |
5 | Servo On/Off Signal | Muestra el estado del Servo encendido/apagado |
6 | Function Button Signal | Indicadores de estado presionado P1-P4 |
7 | Current Task | Área que muestra la tarea que usará el Smart Pendant |
8 | Total Time | Tiempo de reproducción total de Tarea |
9 | Total Count | Recuento de bucles de Tarea |
10 | Average Cycle Time | Tiempo de reproducción promedio de cada ciclo de tarea |
11 | TCP Indicator | Información sobre TCP usada por la tarea actual |
12 | Tool Weight Indicator | Información sobre Peso de la herramienta usada por la tarea actual |
13 | Tool Shape Indicator | Información sobre Forma de la herramienta usada por la tarea actual |
14 | Collision | Información sobre umbral de colisión |
15 | Force | Información sobre fuerza |
16 | Digital / Flange I/O information | Información sobre E/S digital / de la brida |
17 | Close | Botón para cerrar el modo de Smart Pendant. |
Nota
Si se produce una parada de emergencia o una parada de protección en el modo de Smart Pendant, se maneja de la siguiente forma:
- Parada de emergencia: Aparece un mensaje emergente de parada. Después de eliminar la causa de la parada de emergencia, jale o gire el interruptor de parada de emergencia para reanudar; la ventana emergente se cerrará de forma automática.
- Parada de protección que provoca la transición al estado de servo apagado: Aparece un mensaje emergente rojo de parada de protección. Si se pulsa el botón de servo encendido del Smart Pendant después de eliminar la causa de la parada de protección, las unidades servo del robot se encienden y la ventana emergente se cierra de forma automática.
- Parada de protección que provoca la transición al estado interrumpido: Aparece un mensaje emergente amarillo de parada de protección. Si se pulsa el botón Restablecer del Smart Pendant después de eliminar la causa de la parada de protección, el estado del robot cambia a estado de espera normal – Espera manual, Espera automática o Espera HGC.
Para las violaciones a la seguridad donde no es posible eliminar su causa sin mover el robot, se puede utilizar Escape de compresión por cabina. - Para obtener detalles sobre el estado de cada modo, consulte “ Color de LED de estado y de brida para cada modo”.