
Configuración de segmentos múltiples (Waypoint)
Dependiendo del comando de movimiento, puede ser necesario configurar dos o más waypoints. Cada waypoint se denomina segmento; al agregar un waypoint se añade una línea en la parte inferior del comando. Los comandos de movimiento que requieren de dos o más segmentos se denominan “comandos de movimiento de segmentos múltiples”.
El siguiente ejemplo detalla la configuración de un comando Move SJ.
- Toque "Agregar postura" en las propiedades del comando.
- El segmento 1 se agrega a la línea inferior del comando Move SJ.

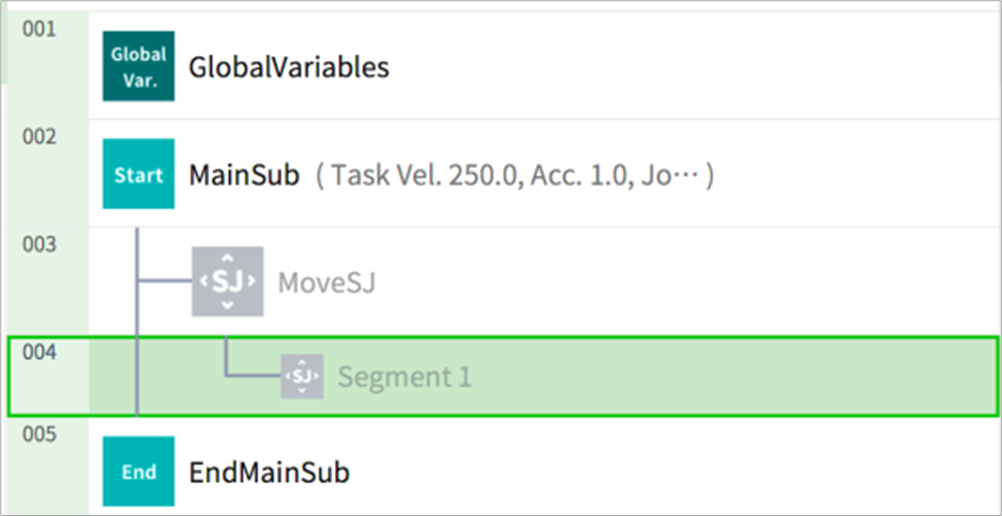
- El segmento 1 se agrega a la línea inferior del comando Move SJ.
- Use la función de avance o bien lleve a cabo una enseñanza directa para mover la herramienta a la posición que desea.
- Toque el botón "Guardar postura" en las propiedades del segmento para guardar la posición de la herramienta del robot.
- Repita los pasos 1 a 3 para agregar segmentos.