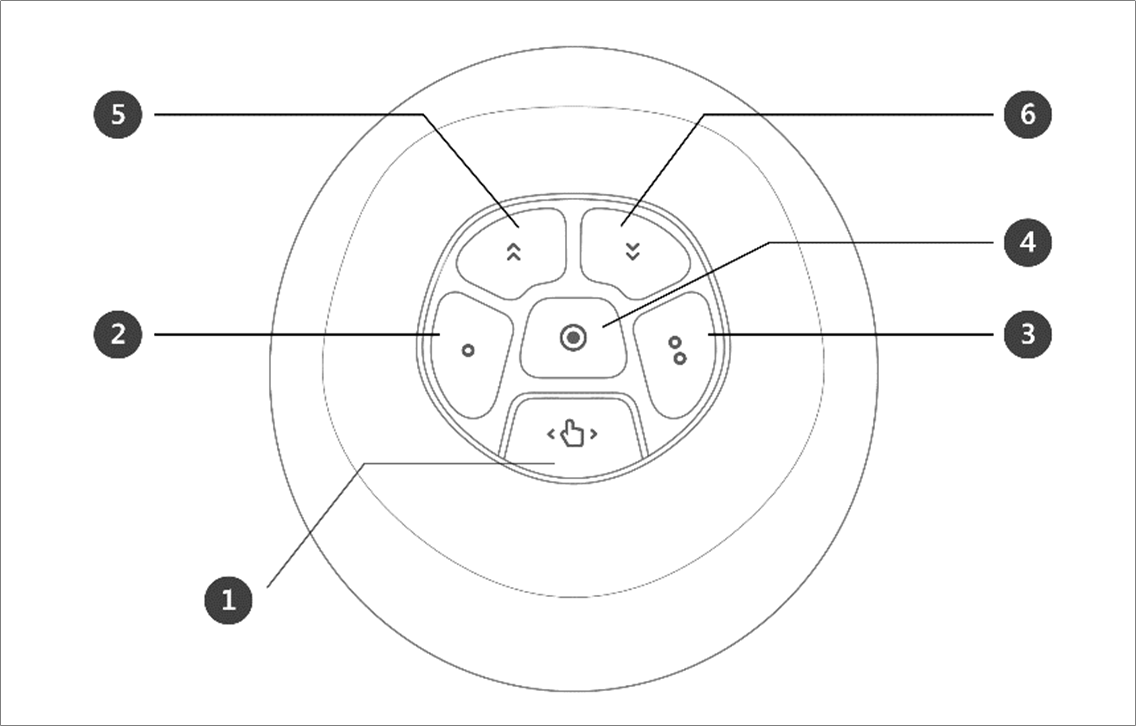
Mueve el enfoque que se muestra en la pantalla una línea hacia arriba
6
One Line Down
Mueve el enfoque que se muestra en la pantalla una línea hacia abajo
Nota: Cambio de configuración de cabina
La configuración del botón de guiado manual yel botón de restricciones requiere 0,2 segundos para modificarse.
Presionando el botón Guardar postura en la pantalla de configuración de habilidades, el enfoque se moverá automáticamente a la siguiente postura.
El botón cancelar solo se puede usar en la ventana de configuración de habilidades que administra las múltiples posturas.
Precaución
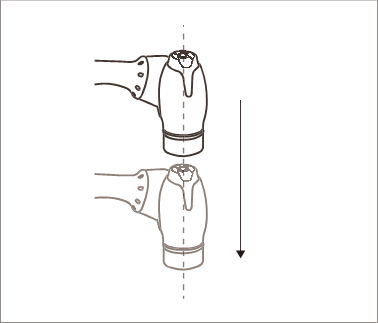
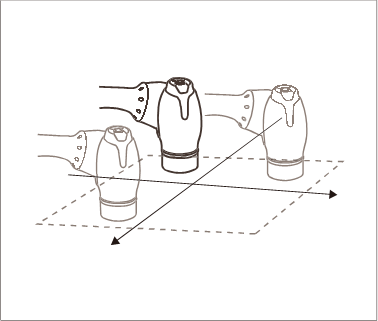
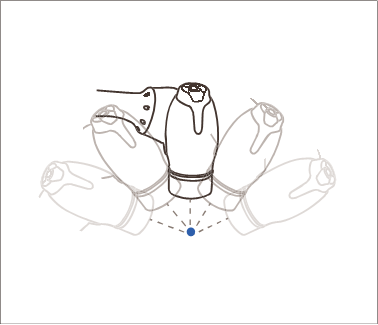
Los modelos de la serie A sin FTS (A0509, A0912) no pueden utilizar movimiento fijo.
Los modelos de la serie A con FTS (A0509S, A0912S) pueden utilizar movimiento fijo.
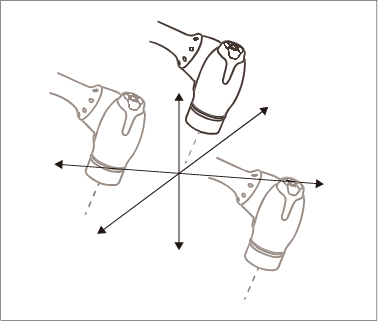
El movimiento fijo depende del FTS conectada a la punta del robot; por lo tanto, resulta esencial conectar la herramienta y que el robot agarre mientras se mueve. Mover el robot mientras se sostiene el cuerpo puede no activar una reacción por parte del robot.