
Asegurar el robot
Use pernos M8 en los cuatro orificios de 9,5 mm en la base del manipulator para asegurarlo.
- Se recomienda utilizar un par de apriete de 20 Nm para ajustar los pernos. Utilice arandelas (planas con resorte) para evitar que se aflojen por la vibración.
- Use un pin marcador de lugar de Φ5 para instalar el manipulator de manera precisa en una ubicación inalterable.
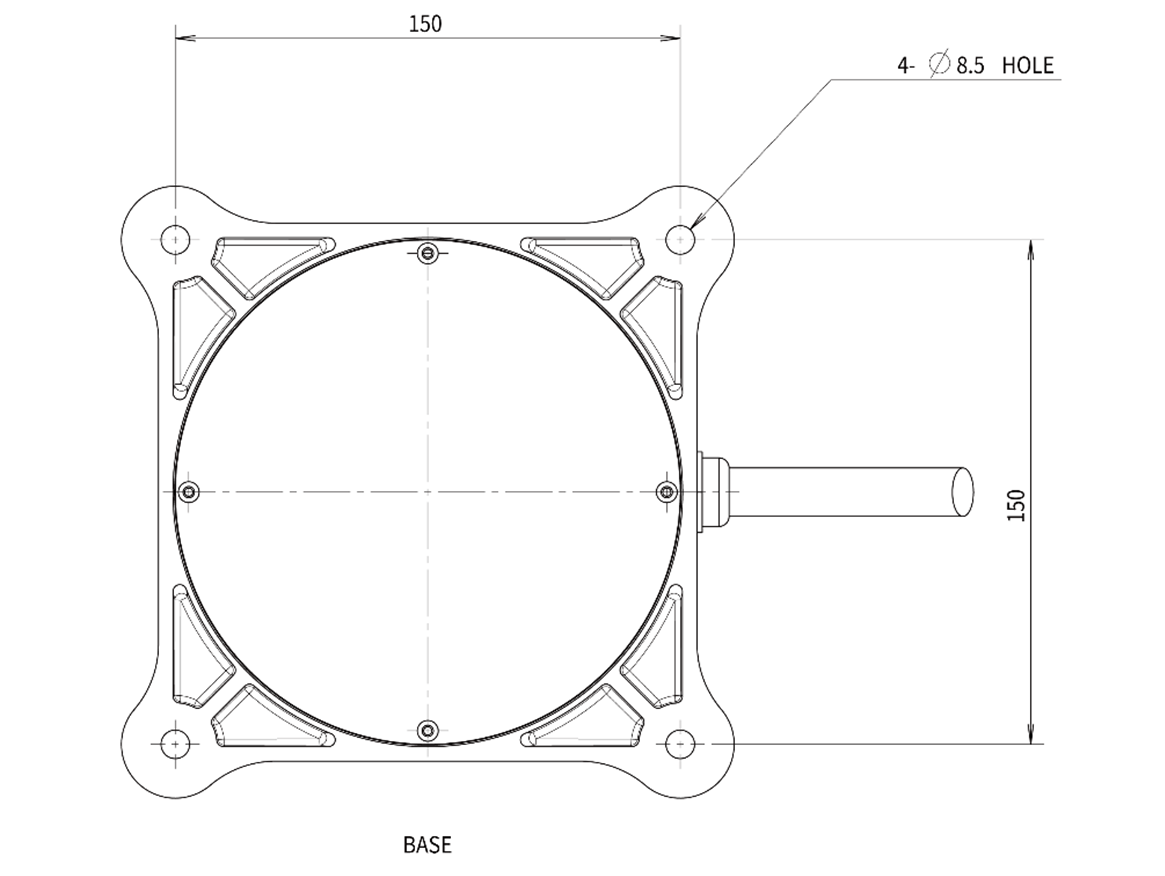
Fijación de la base del manipulator, use cuatro pernos M8. Unidad [mm]
Advertencia
- Ajuste los pernos completamente para evitar que se aflojen durante la operación del manipulador.
- Instale la base del manipulador sobre una superficie sólida que pueda soportar la carga generada durante la operación (10 veces el par máximo y cinco veces el peso del robot).
- El robot interpretará la vibración de la base del manipulador como una colisión y activará la parada de emergencia. Por lo tanto, en el caso de ubicaciones de instalación que cambian de posición de manera automática, no instale la base en un lugar con alta aceleración de movimiento.
- Monte el manipulador en una ubicación específica utilizando los métodos adecuados. La superficie de montaje debe ser sólida.
- El manipulador se puede dañar si entra en contacto con agua durante un período prolongado de tiempo, por lo tanto, no lo utilice en un entorno húmedo o bajo el agua.