Arranque del sistema
Después de encenderse, el sistema arranca. Una vez completado el proceso de arranque, la aplicación del sistema se muestra en el teach pendant. Para obtener más información acerca de la aplicación del sistema, consulte “ Configuración de la pantalla del programa”.
Nota
- Servo encendido: Para cambiar la postura del robot, el robot debe estar en estado servo encendido donde la alimentación se suministra a las articulaciones del robot y este se encuentra en modo de espera. Para obtener más información acerca del servo encendido, consulte “Servo encendido”
- Configuración de fecha y hora: La fecha y la hora que se muestran en el teach pendant y el mensaje de registro en el robot siguen la configuración de fecha y hora del sistema, por lo cual es preciso configurar la fecha y hora en el arranque inicial. Para obtener más información acerca de cómo configurar la fecha y la hora, consulte “Configuración de fecha y hora”
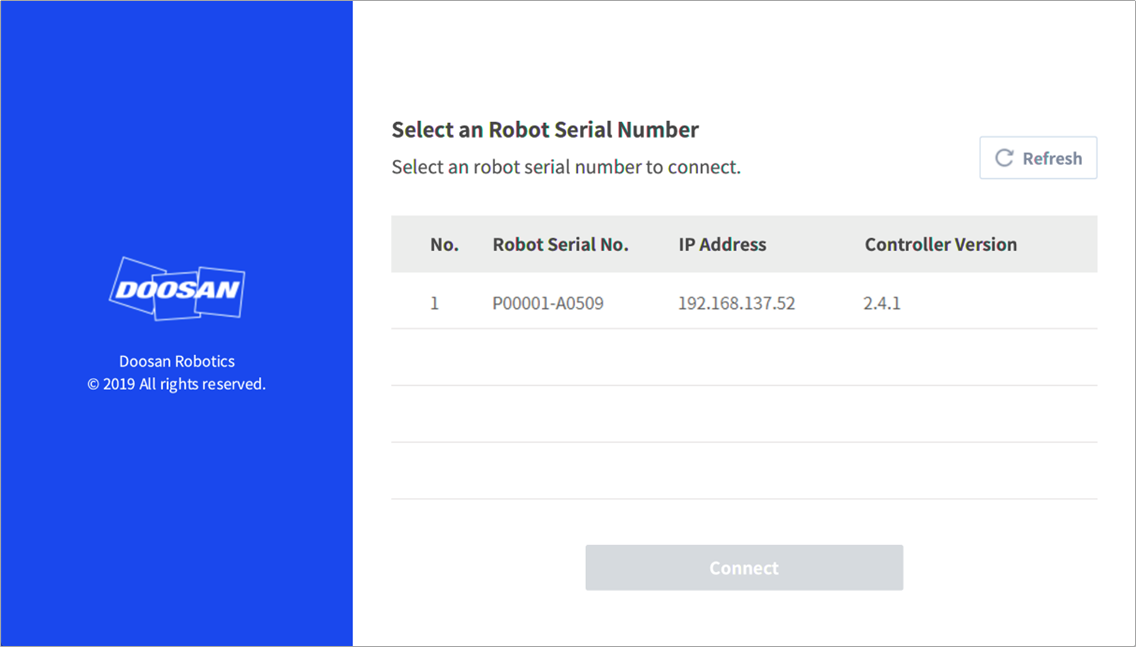
- Utilizar la plataforma DART permite el control del robot sin el teach pendant.
- La plataforma DART presenta una pantalla que muestra al robot conectado a la red después del arranque y el proceso de controlar el número de serie del robot y conectarse al robot tiene lugar en esta pantalla.