
Ajuste del robot: Establecer coordenadas mundiales
OPCIONAL NORMAL 3 MIN
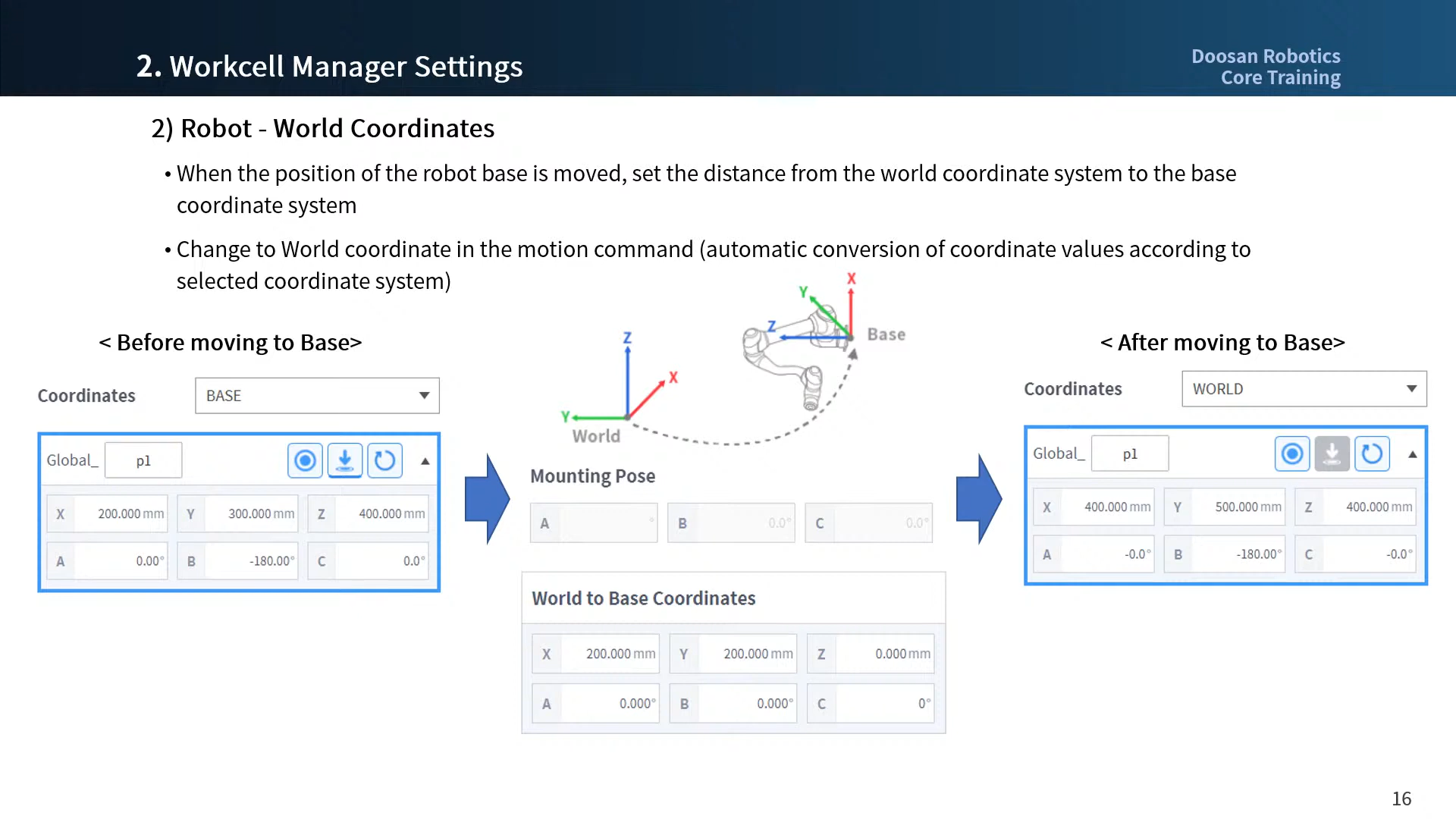
Las coordenadas mundiales del robot se pueden establecer desde Coordenadas Mundiales. En caso de que la coordenada del robot sea la coordenada base, este paso se puede omitir.
Las coordenadas del mundo se pueden establecer a través de Workcell Manager > Robot > Coordenadas del mundo. Para obtener más información, consulte Establecer coordenadas mundiales.
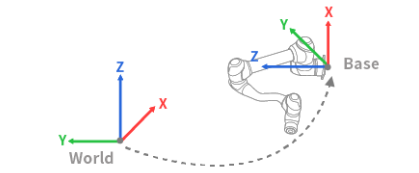
- Las coordenadas universales se utilizan cuando la ubicación de instalación de la base del robot se mueve/gira físicamente.
- Al cambiar las coordenadas del mundo se aplicará el mismo movimiento/rotación a la pantalla del simulador del robot.
Nota
Las coordenadas del mundo también se pueden utilizar incluso después de cambiar la ubicación de la base y el ángulo después de la enseñanza del robot. Si las coordenadas de las tareas creadas a través de la enseñanza del robot en el pasado se cambian de BASE a MUNDO, se aplica un desplazamiento correspondiente al movimiento/rotación de las coordenadas del mundo a todas las coordenadas de movimiento.