
Configuración de las coordenadas geográficas
Se puede establecer un sistema de coordenadas que representan al robot y a la pieza de trabajo. Este sistema de coordenadas se denomina Coordenadas geográficas y es diferente de las Coordenadas base, que están fijas a la base. Es posible establecer la postura de las coordenadas base usando coordenadas geográficas, y las coordenadas geográficas se pueden seleccionar durante la enseñanza y el movimiento usando el robot en Task Builder y Task Writer. Para configurar coordenadas geográficas, toque el botón 
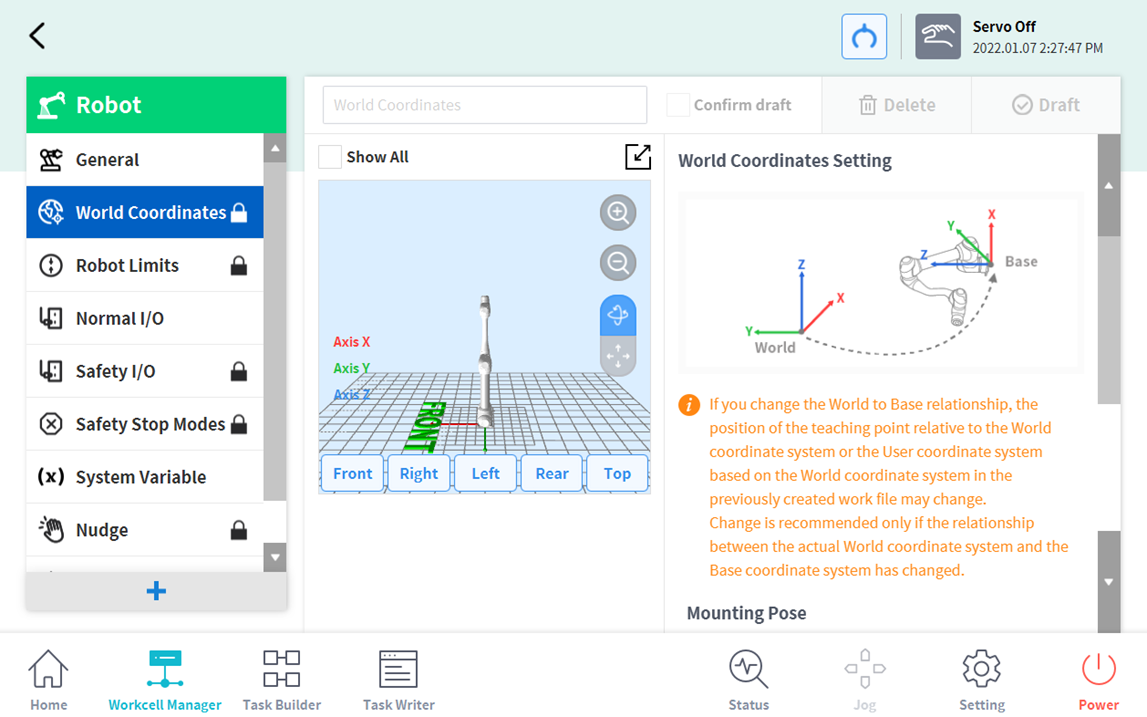
- Toque el botón Editar que se encuentra en la parte superior.
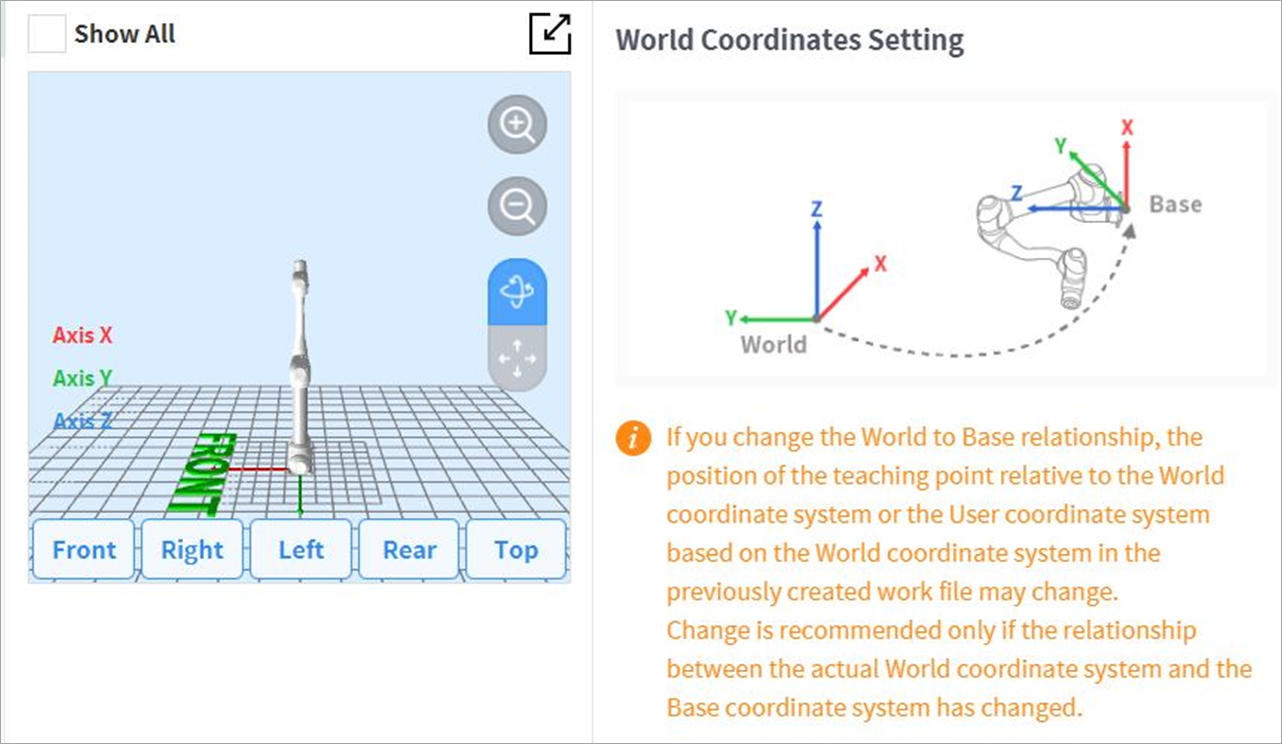
Consulte la figura que muestra la relación entre la coordenada geográfica y la coordenada base, además de las precauciones relacionadas.
Advertencia
Al cambiar la relación entre las coordenadas base y geográficas, puede cambiar el punto de enseñanza de las coordenadas geográficas o las coordenadas de usuario en función de las coordenadas geográficas. Los cambios se recomiendan únicamente cuando cambia la relación real entre las coordenadas geográficas y las coordenadas base.
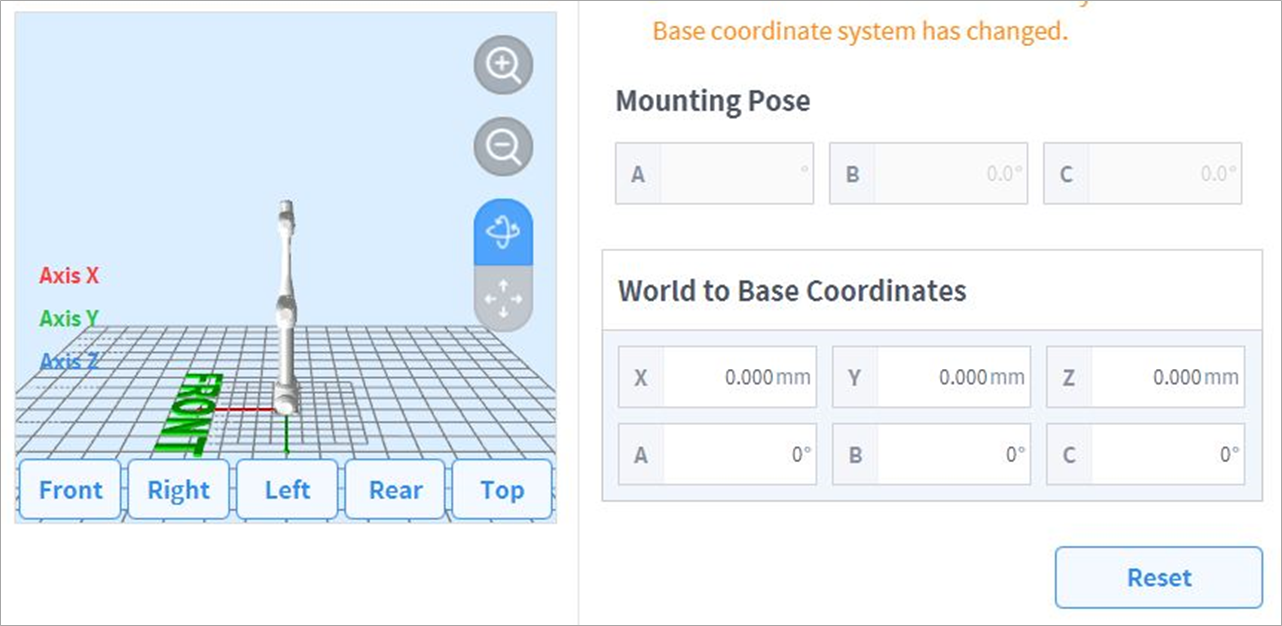
- La postura de montaje (inclinación de la instalación) se muestra en la parte central derecha. En general, las coordenadas geográficas describen el entorno de trabajo desde la perspectiva del usuario, de modo que la dirección Z de las coordenadas geográficas está en la dirección del techo. Debido a que un eje de las coordenadas base está fijo al plano inferior del robot, la relación entre las coordenadas geográficas y las coordenadas base cambia según la ubicación/postura de instalación del robot. La figura de arriba asume que el robot está instalado en una pared. En tal caso, el eje Z de las coordenadas base es perpendicular a la pared, que está paralela al eje Y de las coordenadas geográficas, y la inclinación y rotación de la postura de montaje se muestran como 90 y 0 grados respectivamente. La relación entre las coordenadas base y geográficas se define como la relación de la coordenada base basada en las coordenadas geográficas. Si existe un diseño predefinido para el entorno de trabajo, configure las coordenadas en consecuencia Los valores X/Y/Z significan movimiento, y los valores A/B/C significan rotación según la definición de Z-Y-Z de Euler. Si la postura de montaje se define de acuerdo con la postura de instalación del robot, es apropiado utilizar el ángulo de rotación de B/C como la postura de montaje B/C. Sin embargo, si la postura de montaje se configura usando la función de suposición automática, el valor asumido puede contener una desviación, de modo que se recomienda usar el ángulo de rotación definido de acuerdo con el diseño.
- Toque el botón Aplicar.
- Toque el botón Confirmar.
Nota
Los programas de usuario creados usando Task Builder y Task Writer después de aplicar la inclinación de la instalación en versiones de SW anteriores a GF020400 deben establecer las coordenadas geográficas con la inclinación de instalación aplicada al actualizar a versiones de SW posteriores a GF020400 y convertir todas las coordenadas base en coordenadas geográficas dentro del programa de usuario para poder utilizar adecuadamente los puntos de enseñanza existentes.
Si varios robots están trabajando en un espacio de trabajo común o si el robot se instala en un dispositivo en movimiento como una base móvil o pista lineal, la relación y la posición del punto de enseñanza entre la pieza de trabajo y la base del robot pueden cambiar. Las coordenadas geográficas, que son fáciles de enseñar, trabajar y compartir, se pueden configurar en esos entornos.
Cuando se instala o se reemplaza una herramienta, el peso de la misma se debe configurar antes de operar el robot. Para obtener más información acerca de la configuración del peso de la herramienta, consulte Configuración de peso de la herramienta.