
Conexión de E/S de la Controlador
Además del manipulador y teach pendant, se pueden conectar varios equipos externos a la controlador a través del terminal de E/S de la controlador. Se pueden conectar varios periféricos, como dispositivos de seguridad, incluido el interruptor de parada de emergencia, cortinas de luz y tapetes de seguridad, y los dispositivos necesarios durante la configuración de la celda de trabajo del robot, incluidos las válvulas solenoides neumáticas, los relés, los PLC y los codificadores de cinta transportadora.
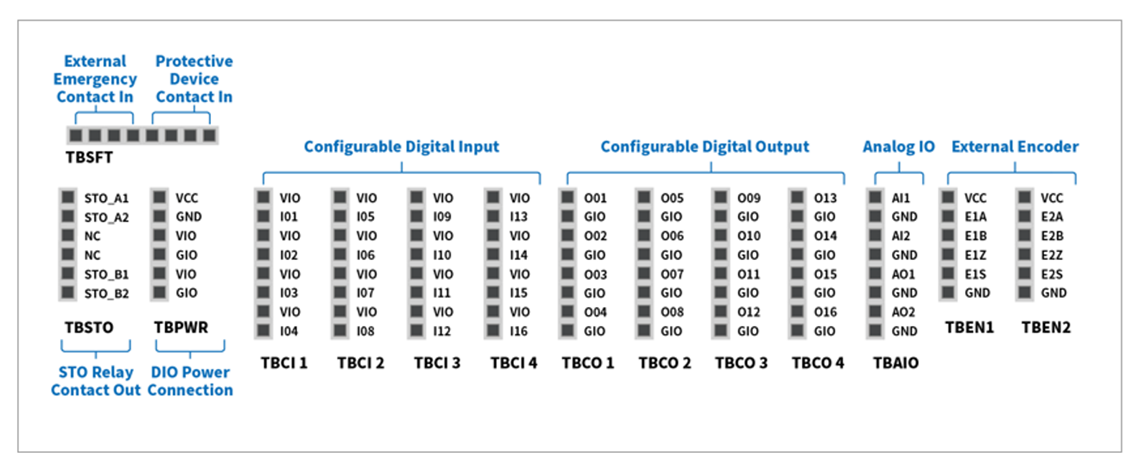
La E/S de la controlador consta de las siguientes seis unidades:
- Bloque de terminales para entrada de contacto Safety (TBSFT): Se usa para conectar los dispositivos necesarios para la parada de emergencia y la parada de protección
- Bloque de terminales para alimentación de E/S digital (TBPWR):
- Bloque de E/S digital Configurable (TBCI1- 4, TBCO1– 4): Se usa para conectar los periféricos necesarios para la operación del robot
- Bloque de terminales para E/S analógica (TBAIO):
- Bloque de terminales para la entrada del codificador (TBEN1, TBEN2)
- Bloque de terminales para salida de contacto de Safety (TBSTO): Se conecta a la línea de alimentación de los periféricos del robot de modo que cuando el robot entra en estado STO, también se apaga la alimentación a los periféricos.
Precaución
- Apague la alimentación cuando conecte terminales a la E/S de la controlador para evitar daños y averías en el producto.
- Doosan Robotics no compensará ningún daño al producto causado por una conexión de terminales inapropiada o negligencia del usuario.
- Asegúrese de apagar la fuente de alimentación externa cuando apague la controlador.