
Pantalla de modo real: Pestaña de información del efector final
La pestaña de información del efector final de la pantalla de modo real de Task Builder está estructurada de la siguiente manera:
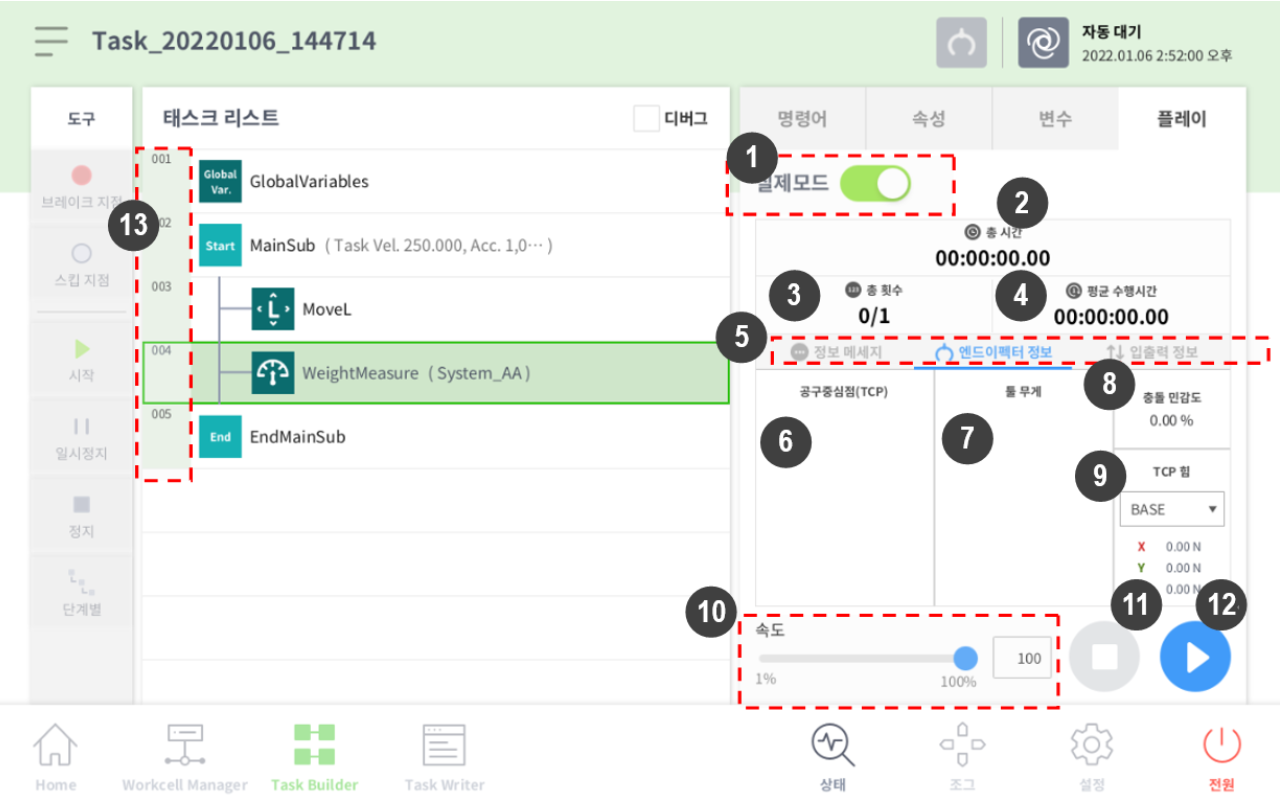
N.º | Elemento | Descripción |
1 | Real Mode ( | Establece el modo de reproducción de prueba del robot.
|
2 | Total time | Muestra el tiempo total transcurrido luego de la ejecución de la tarea. |
3 | Total count | Muestra la cantidad total de ejecuciones de tareas. |
4 | Average execution time | Muestra el tiempo promedio destinado a ejecutar un ciclo de la tarea en la lista de tareas. |
5 | Information Screen Shift Tab | Puede cambiar entre la pantalla de mensajes de información del robot, la pantalla de información del efector final y la pantalla de información de entrada/salida.
|
6 | Tool center point information area | Muestra la información del centro de la herramienta configurada mediante las funciones de configuración de peso y centro de la herramienta del comando TCP o el avance. |
7 | Tool weight information | Muestra la información del peso de la herramienta configurada mediante las funciones de configuración de peso y centro de la herramienta del comando TCP o el avance. |
8 | Collision information area | Muestra el valor de sensibilidad de colisión establecido para el área donde el robot está posicionado actualmente. |
9 | Force information area | Muestra la información sobre fuerza que ocurre en los sistemas de coordenadas de referencia, de usuario, geográficas o base. El sistema de coordenadas de referencia muestra la fuerza en función de la información del sistema de coordenadas de referencia aplicado al robot. |
10 | Speed slider | Establece la velocidad del robot en modo real o virtual. |
11 | Stop button | Detiene la tarea en curso. |
12 | Execute/pause toggle button | Ejecuta o pausa el trabajo en la lista de tareas. |
13 | Time | Muestra el tiempo empleado en la ejecución del comando o la habilidad correspondiente. |

Precaución