
Nombres y funciones
Manipulador
Nombres de las piezas
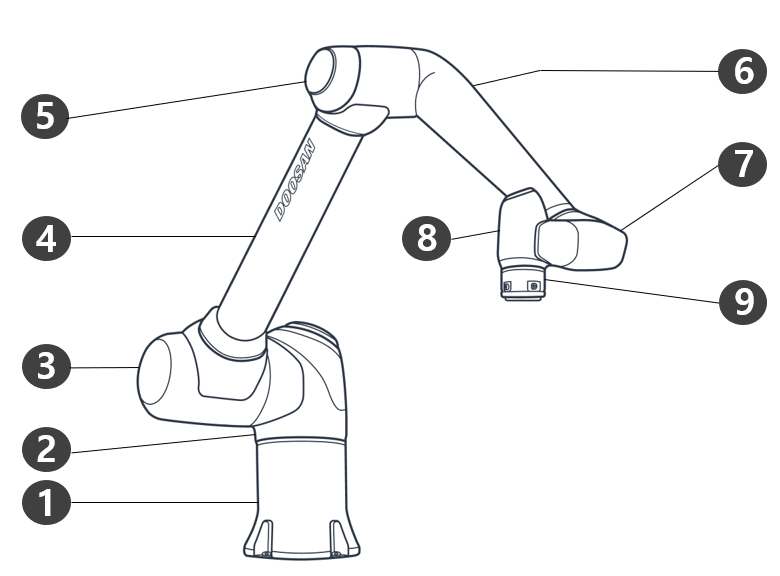
N.º | Nombre | N.º | Nombre |
|---|---|---|---|
1 | Base | 6 | Link2 |
2 | J1 | 7 | J5 |
3 | J2 | 8 | J6 |
4 | Link1 | 9 | Tool Flange |
5 | J3 | 10 |
Funciones clave
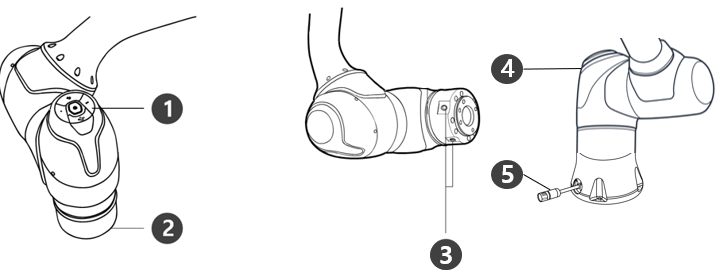
N.º | Elemento | Descripción |
|---|---|---|
1 | Cockpit | [Opción] Controlador que se usa para enseñanza directa y operación. |
2 | Tool flange | Área para instalar las herramientas. |
| 3 | Flange I/O | Puerto E/S para control de la herramienta. (Entrada digital de 3 canales, salida de 3 canales) |
4 | Flange LED | Muestra el estado del robot con diferentes colores. |
5 | Connector | Se usa para suministrar energía y para la comunicación del robot |
Controlador
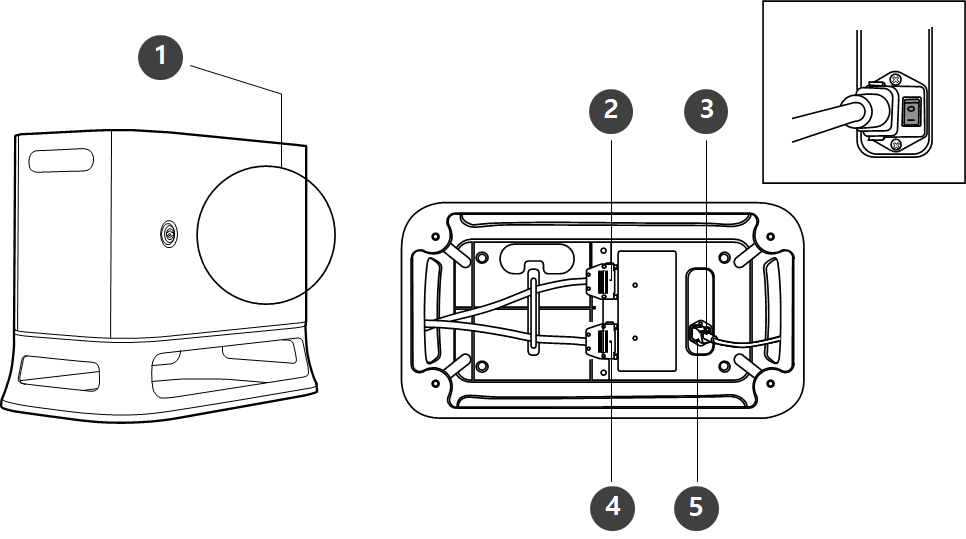
N.º | Elemento | Descripción |
|---|---|---|
1 | I/O connection terminal (internal) | Se usa para conectar la controlador o los periféricos. |
2 | Teach pendant cable connection terminal | Se usa para conectar el cable de teach pendant con la controlador. |
3 | Power switch | Se usa para encender/apagar la alimentación principal de la controlador. |
4 | Manipulator cable connection terminal | Se usa para conectar el cable del manipulador a la controlador. |
5 | Power connection terminal | Se usa para conectar el suministro de energía de la controlador. |
Nota
- Si seleccionó un controlador opcional, consulte las instrucciones en el apéndice para conectar los cables.