
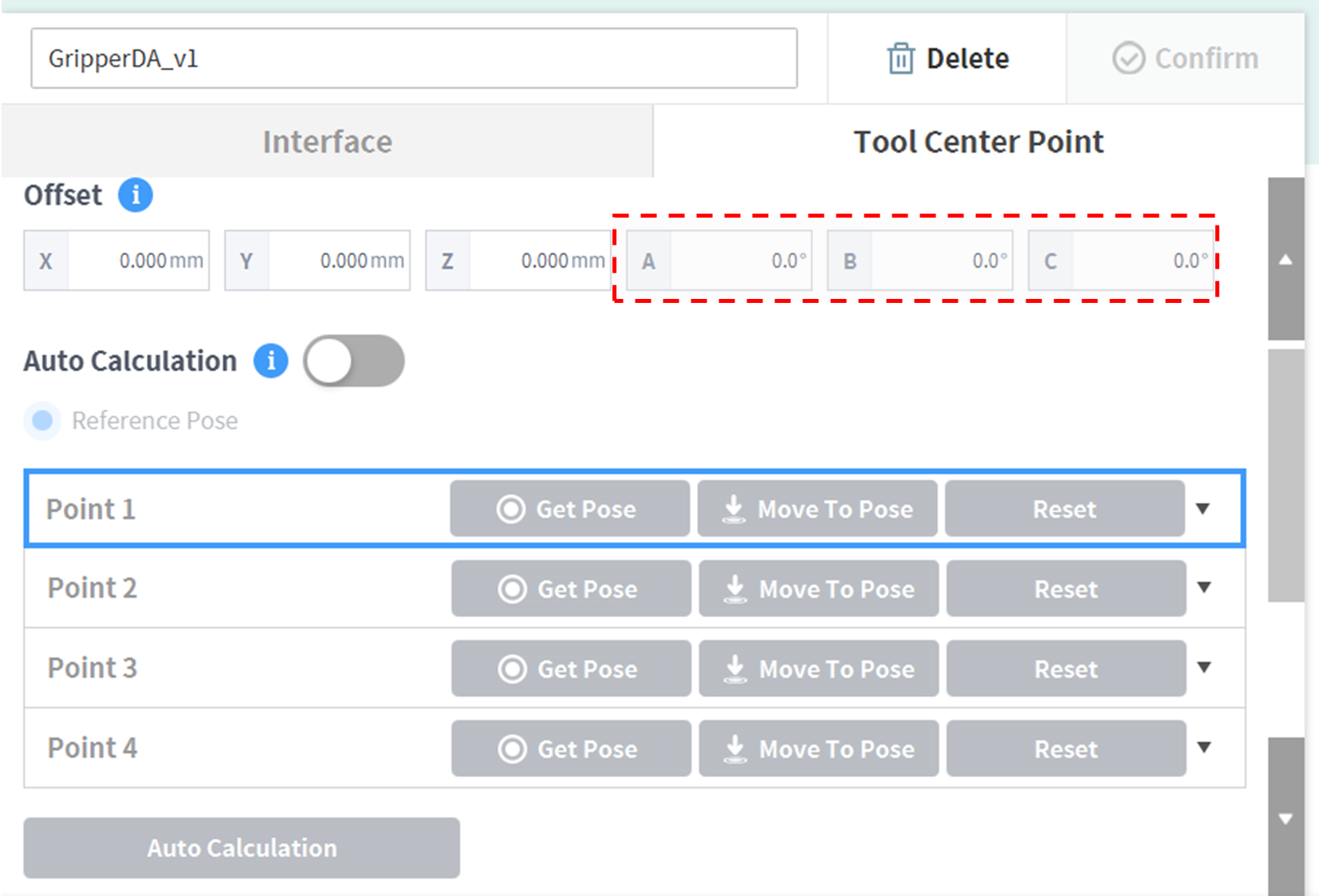
Configuración del centro de la herramienta
Las definiciones del eje de coordenadas expresado con x, y, z y el eje de coordenadas expresado con X, Y, Z son las siguientes:
- Eje de coordenadas de la “Coordenada de brida” (x, y, z): La dirección del eje de coordenadas definida en el extremo de la brida es idéntica a la coordenada del robot con un ángulo articular del robot de (0,0,0,0,0,0).
- Eje de coordenadas de la “Coordenada de TCP” (X,Y,Z): El eje de coordenadas se define en el extremo de la herramienta instalada en el extremo de la brida o punto de trabajo. El ángulo de rotación de la “Coordenada de TCP” se define basado en la “Coordenada de brida” siguiendo el orden 1) a 3) de lo siguiente:
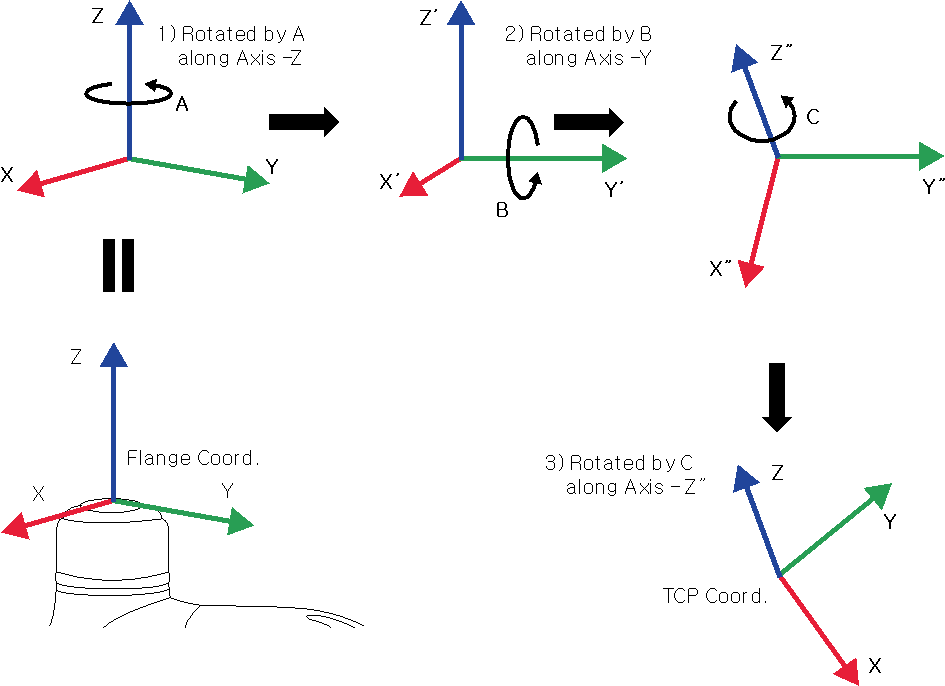
1) Rotar A grados sobre el eje z de la Coordenada de brida
2) Rotar B grados sobre el eje y’ de la coordenada rotada según 1)
3) Rotar C grados sobre el eje z’’ de la coordenada rotada según 2)
Estos son algunos ejemplos de configuración del TCP según el método que se describe más arriba:
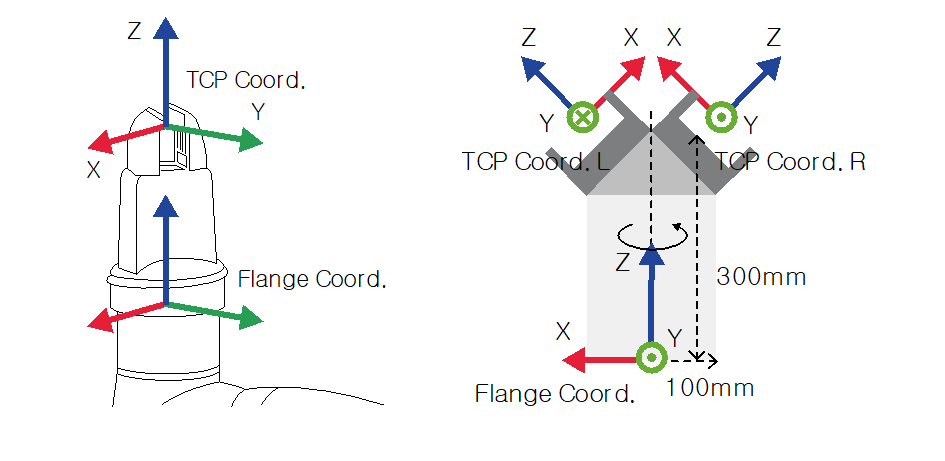
- [X, Y, Z, A, B, C] = [0, 0, 100, 0, 0, 0]: Pinza general con desplazamiento en la dirección Z (Coord. TCP)
- [X, Y, Z, A, B, C] = [100, 0, 300, 180, -45, 0]: Pinza izquierda con ángulo de 45 grados (Coord. TCP L)
- [X, Y, Z, A, B, C] = [-100, 0, 300, 0, -45, 0]: Pinza derecha con ángulo de 45 grados (Coord. TCP R)