Comprender el cumplimiento y el control de la fuerza
OPCIONAL DURO 20 MIN
El control de fuerza y el control de conformidad son funciones que controlan la fuerza del robot. Estas funciones también controlan la realización del movimiento y el control de la fuerza si se agrega un comando de movimiento. El control de cumplimiento y el control de fuerza tienen las siguientes diferencias:
- Control de conformidad
- El robot cumple con la fuerza externa en el extremo del robot TCP durante el control de conformidad, y cuando se retira la fuerza externa, se crea una fuerza que devuelve el robot a su posición original, haciendo que el robot se mueva a la posición correspondiente.
- Se puede utilizar cuando se requiere movimiento lineal en una superficie irregular sin dañar el robot ni la superficie. Se puede utilizar para evitar colisiones inesperadas alrededor de la pieza.
- Control de fuerza
- Durante el control de la fuerza, la fuerza se genera en el TCP del extremo del robot. La aceleración se genera en la dirección en la que se genera la fuerza, de modo que el robot se mueve hacia la dirección del movimiento y hacia la dirección de la fuerza al mismo tiempo.
- Cuando se hace contacto con un objeto, se aplica fuerza sobre el objeto hasta que la fuerza establecida y la fuerza repelente del objeto forman un equilibrio.
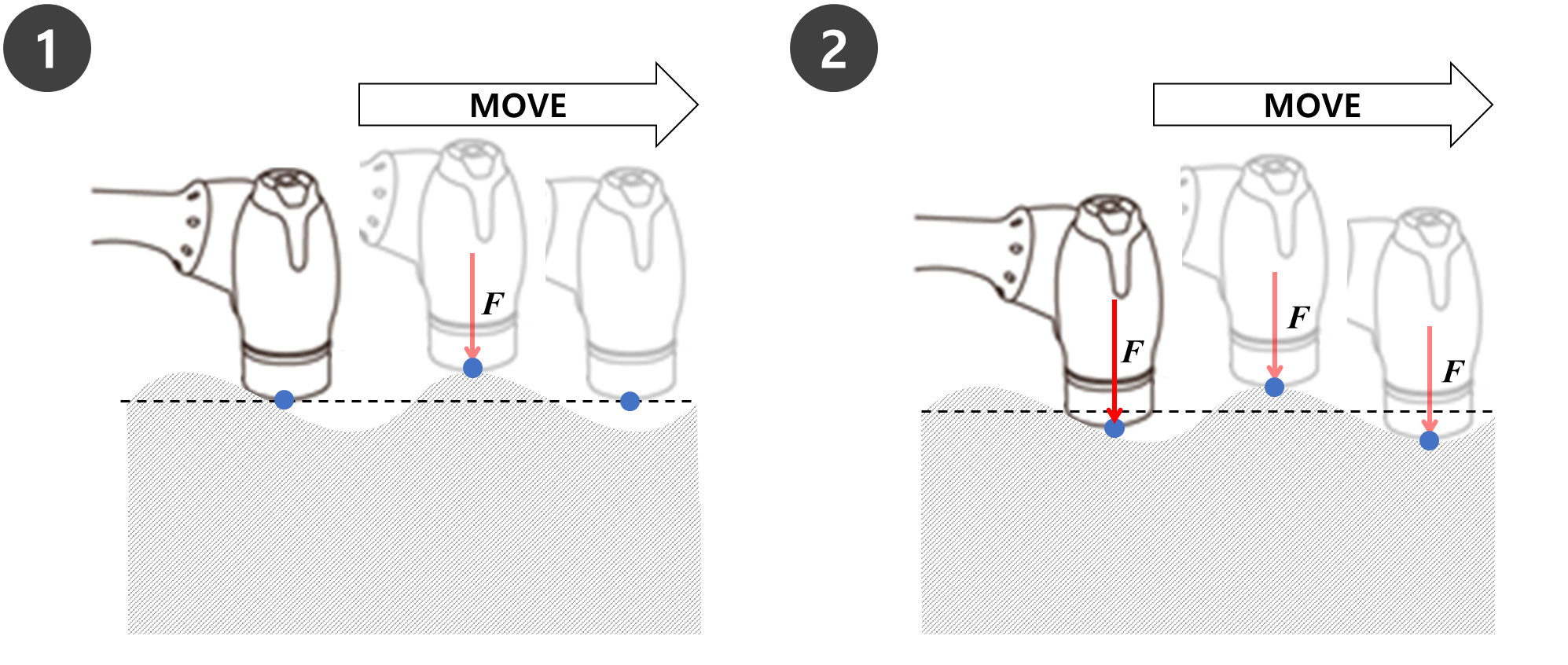
- Se puede utilizar cuando es necesario aplicar la misma fuerza en un movimiento lineal sobre una superficie irregular. Se puede utilizar en tareas que requieren una fuerza constante mientras se mueve, como pulir.
Nota
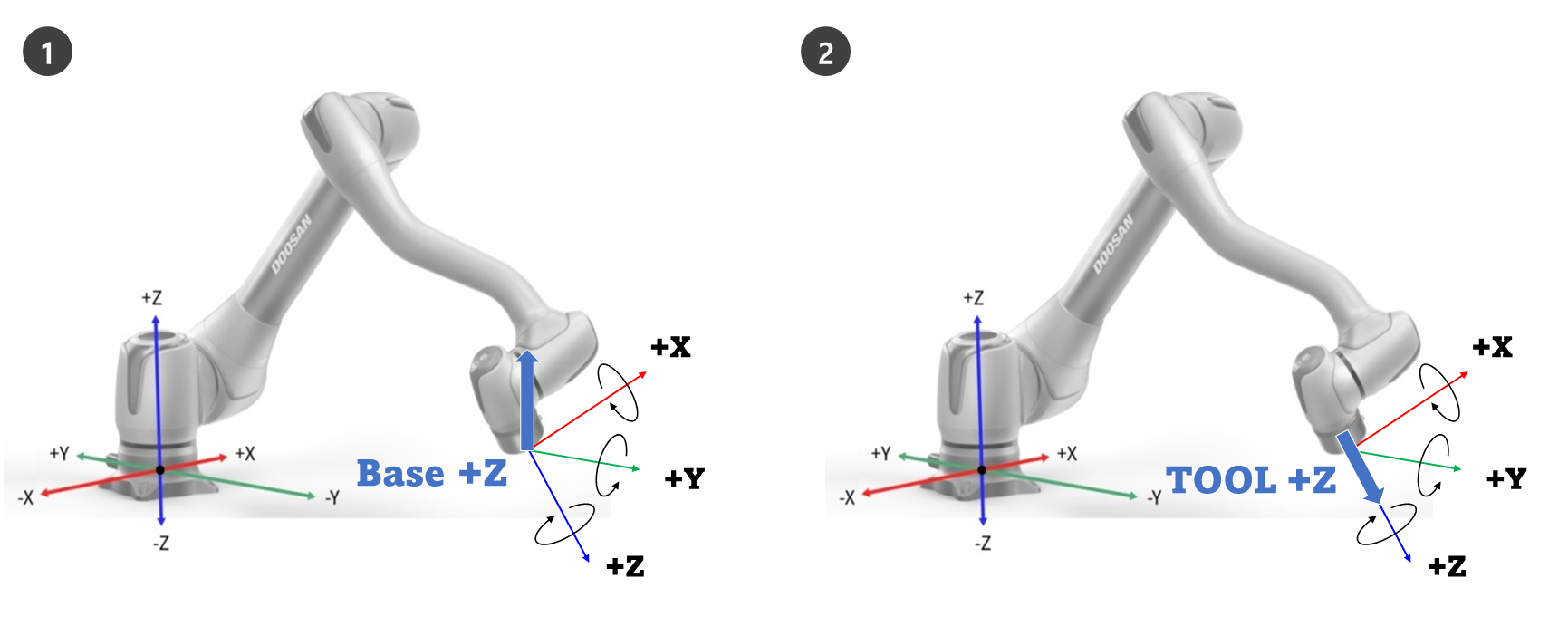
Los comandos Compliance y Force se ejecutan en función de las coordenadas actuales. La coordenada predeterminada de una tarea son las coordenadas base y las coordenadas se pueden cambiar con el comando SET.
- Fig. 1 es la dirección de funcionamiento cuando se aplica el control de fuerza/cumplimiento en la dirección +Z en las coordenadas de base.
- Fig. 2 es la dirección de funcionamiento cuando se aplica el control de fuerza/conformidad en la dirección +Z en las coordenadas de la herramienta.
Control de conformidad

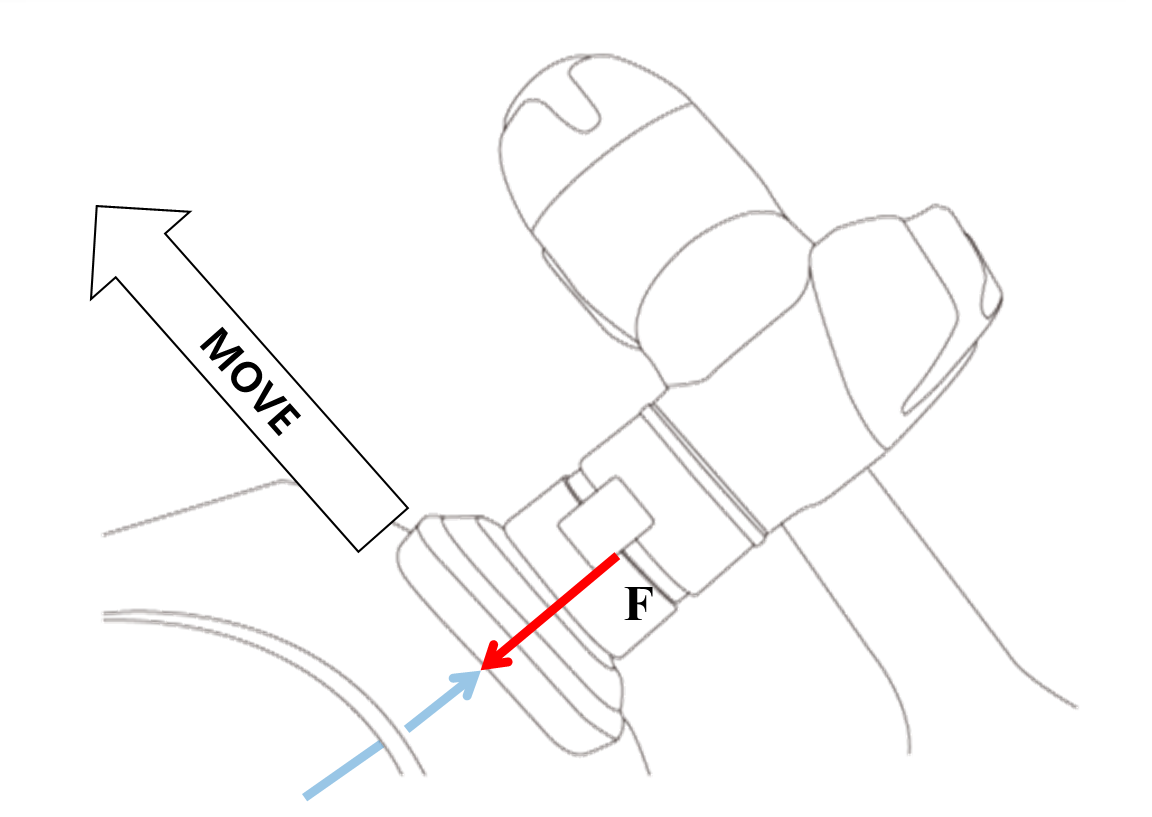
El control de conformidad es la función que cumple la fuerza externa de acuerdo con la rigidez establecida cuando se aplica la fuerza en el TCP del extremo del robot. Equilibra fuerzas en el punto objetivo y es un método de control que genera fuerza de rechazo si el desplazamiento se produce lejos del punto de equilibrio. Durante el control de conformidad, el extremo del robot rebota como un resorte.
- Si se produce una colisión cuando se utiliza el control de movimiento solo, es posible que el objeto colisionado se dañe.
- Los robots Doosan Robotics se detienen de forma segura cuando se produce una colisión, pero dependiendo de la configuración del usuario, comoLímites de seguridad > Sensibilidad de colisión, pueden ocurrir las siguientes situaciones.
- Si el control de cumplimiento se establece en ON durante el control de movimiento, el robot se moverá mientras cumple con el objeto en colisión.
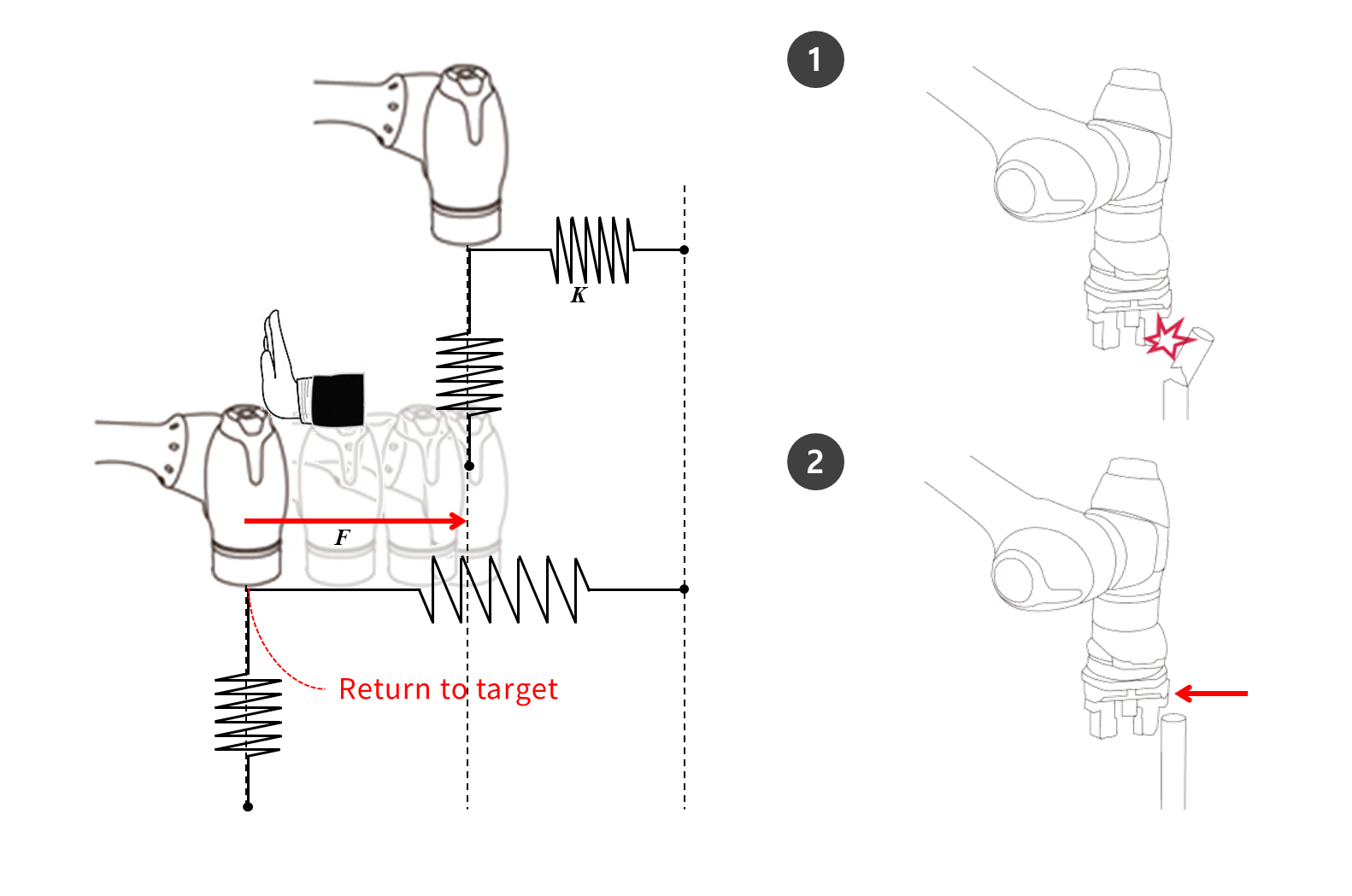
Si F es fuerza externa, K es rigidez y X es distancia, las siguientes fórmulas son verdaderas.
- F = K * X
- K = F / X
- X = F / K
En función de las fórmulas anteriores, si la rigidez del control de conformidad se establece en 1000N/m y si el robot se mueve 1 mm, la fuerza externa generada es 1N.
- F=1000 N/m*0,001 m=1 N (0,001 m=1 mm)
Nota
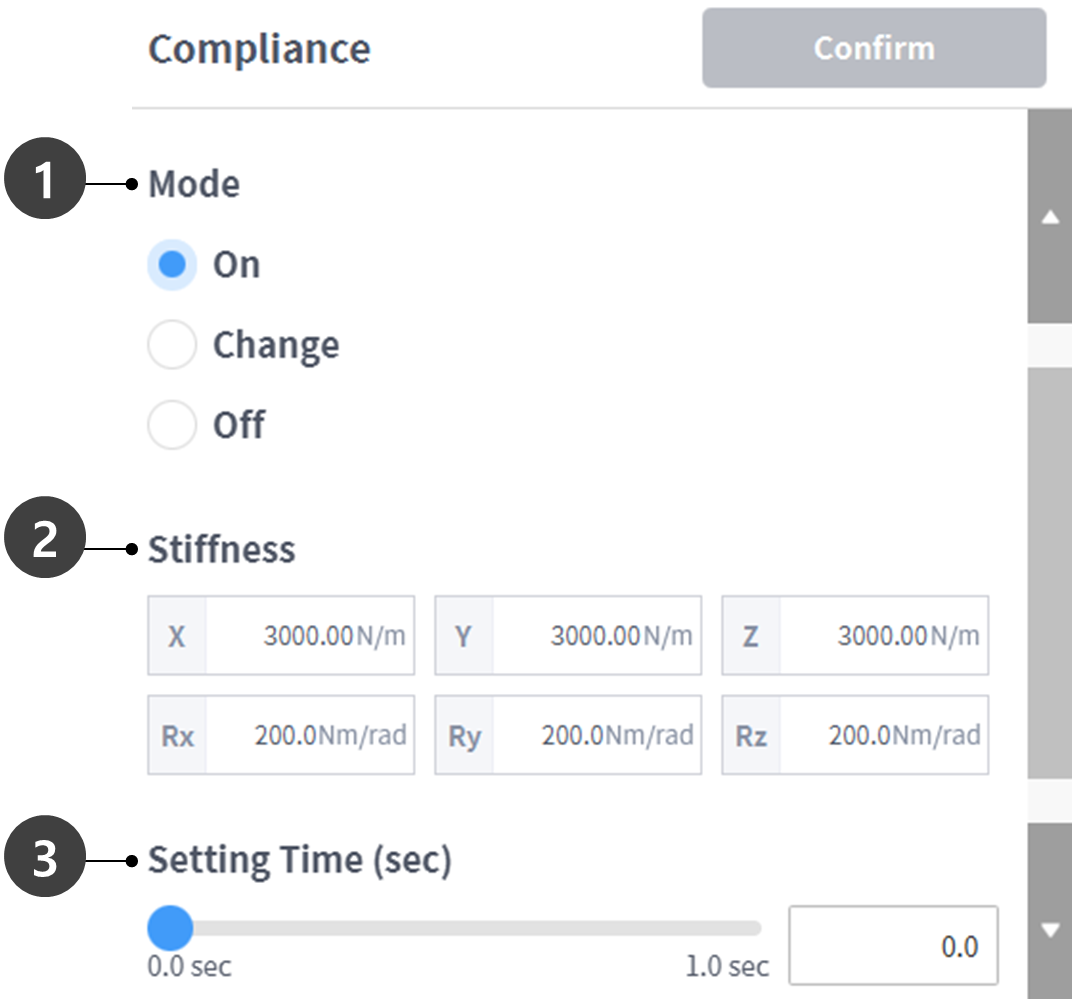
En el comando Propiedad de cumplimiento, se pueden establecer los siguientes valores:
- Modo
- En: Activa el control de conformidad
- Cambiar: Si el modo de cumplimiento está activado, cambia a rigidez
- Apagado: Desactiva el control de conformidad
- Rango de rigidez
- M/H Series : Translation(0~20000N/m), Rotation(0~1000Nm/rad)
- A Series : Translation(0~10000N/m), Rotation(0~300Nm/rad)
- Los valores de rigidez más bajos responderán a la fuerza externa con mayor suavidad y requerirán más tiempo para volver al punto objetivo
- Ajuste de la hora
- Es el tiempo necesario para que el valor de rigidez actual alcance el valor de rigidez establecido (0-1s)
Precaución
- El peso de la herramienta y el TCP (punto central de la herramienta) deben ajustarse con precisión. Un peso de herramienta impreciso puede hacer que el robot detecte el peso de la herramienta como fuerza externa, y si se activa el comando de cumplimiento, se generará un error de posición.
- La tensión del conjunto de vestido puede generar un par externo en el robot. Por lo tanto, tenga cuidado al instalar el paquete de vestimenta.
- No se puede activar o desactivar la compatibilidad mientras se ejecuta el movimiento asíncrono o el movimiento de fusión.
- Durante el comando de cumplimiento activado, sólo se permite el movimiento lineal. No se permiten movimientos conjuntos, como MoveJ y MoveSJ.
- Durante el comando Compliance On, el peso de la herramienta o TCP no se pueden cambiar.
- Durante el comando Compliance Command On, es posible no alcanzar con precisión el punto objetivo debido al cumplimiento del par generado durante la ejecución del movimiento. Por lo tanto, se recomienda activar el control de cumplimiento cerca del punto objetivo. O bien, es posible minimizar el error de posición estableciendo un valor de rigidez grande.
Control de fuerza

El control de fuerza es una función que aplica fuerza en la dirección de control de fuerza hasta que la fuerza establecida y la fuerza repelente forman un equilibrio
- Mueve el robot en la dirección de fuerza establecida y, si se hace contacto con un objeto, mantiene la fuerza introducida (N)
- Es capaz de controlar el movimiento en una dirección diferente de la dirección de la fuerza mientras aplica una fuerza constante
- El ajuste mínimo es +/- 10N y se puede ajustar con una resolución de 0,2N
- El control de fuerza no está disponible en la zona de singularidad
- En general, el control de cumplimiento se utiliza junto con el control de fuerza para que el control de fuerza cumpla con la fuerza externa
Nota
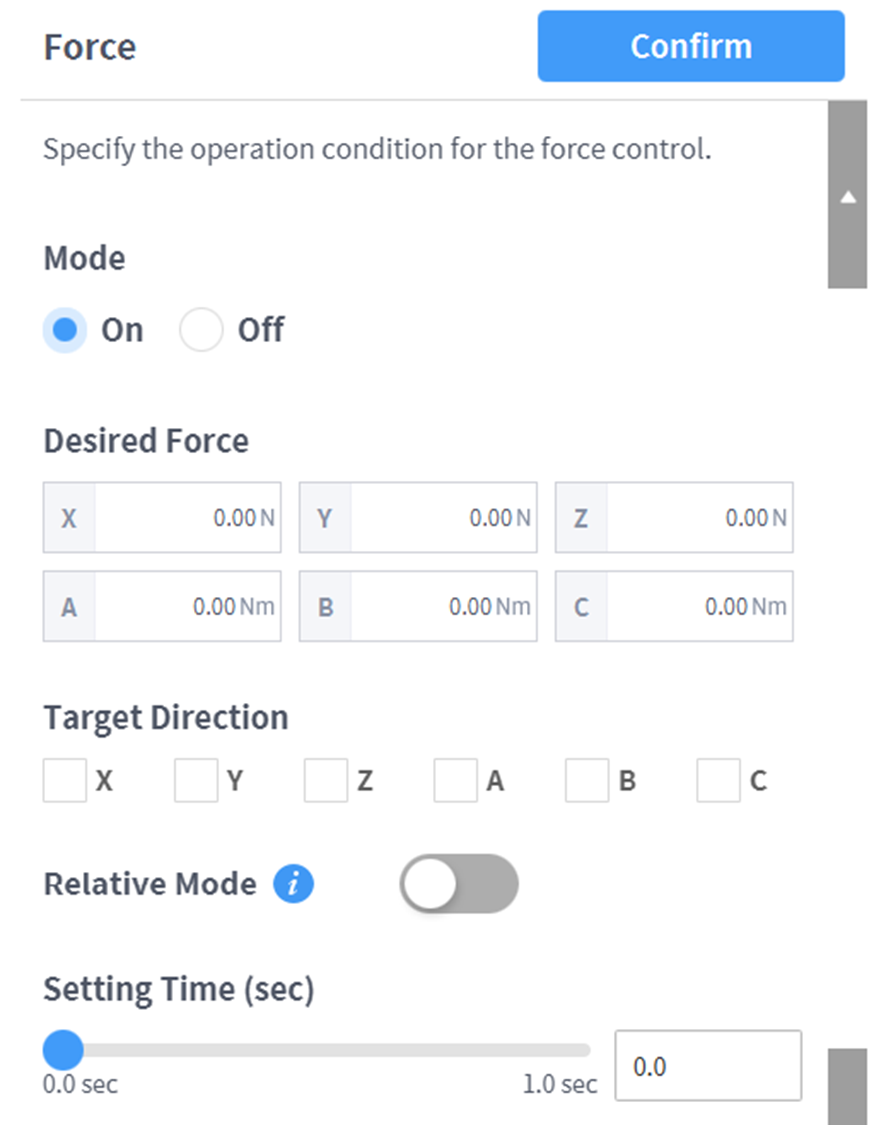
Desde la propiedad Force Command, se pueden establecer los siguientes valores.
- Modo
- En: Activa el control de fuerza
- Apagado: Desactiva el control de fuerza
- Rango de fuerza deseado
- X, Y, Z: 10 - (máximo de cada robot) N
- A, B, C: 5 - (máximo de cada robot) Nm
- Para obtener más información sobre la fuerza máxima, consulte (2.11.0.1_temp-es_ES) Rango de umbrar superior/inferior y valor predeterminado de los parámetros de seguridad.
- Dirección del blanco
- Se mueve al valor objetivo seleccionado de cada dirección.
- Se pueden realizar varias selecciones.
- El control de fuerza sólo se puede ejecutar con el ajuste de dirección después del ajuste de fuerza.
- Si una de las múltiples direcciones seleccionadas alcanza la fuerza objetivo, continuará moviéndose hasta que se alcance el valor objetivo para la otra dirección.
- Modo relativo
- Si este modo está activado, calibra la fuerza externa aplicada en el robot a 0 para mejorar la precisión del control de la fuerza.
- Cuando el modo relativo está desactivado, la fuerza real que se aplica al objetivo es igual a la suma de la fuerza establecida y la fuerza externa.
- Cuando el modo relativo está activado, la fuerza real que se aplica al objetivo es igual a la fuerza establecida.
- Durante el control de la fuerza, se puede producir una desviación dependiendo de la pose o de la fuerza externa.
- Durante el control de la fuerza, es posible no alcanzar el punto objetivo exacto. Por lo tanto, se recomienda habilitar el control de la fuerza cerca del punto objetivo.
- Si este modo está activado, calibra la fuerza externa aplicada en el robot a 0 para mejorar la precisión del control de la fuerza.
- Ajuste de la hora
- Es el tiempo necesario para que el valor de fuerza actual alcance el valor de fuerza establecido (0-1s)