
Configuración de los límites del robot
Establece los límites de seguridad de las funciones de supervisión de seguridad.
Nota
- Los parámetros de límite y de seguridad inicial pueden variar dependiendo de la línea de robots.
- Los límites de seguridad son la condición en la que la función de supervisión de seguridad activa la función de parada. Cuando se completa la parada, la posición del robot y la fuerza aplicadas externamente pueden diferir del umbral de seguridad configurado.
Límites del robot/TCP
Para configurar los límites del robot/TCP, vaya a la celda de trabajo Robot y seleccione Robot > Límites del robot > TCP/Robot. El diseño de la pantalla de configuración de los límites del robot/TCP se compone de lo siguiente:
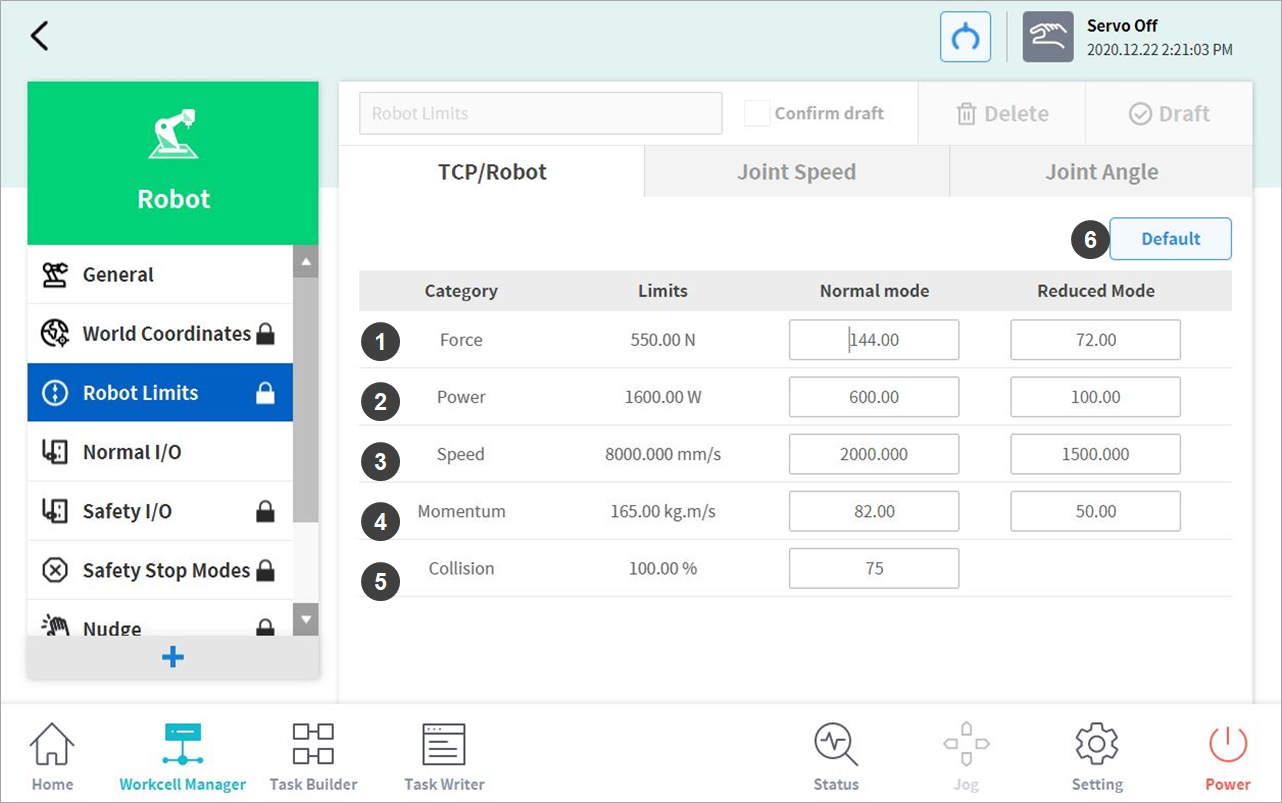
N.º | Elemento | Descripción |
1 | Force (N) | Puede limitar el nivel de fuerza aplicado al centro de la herramienta (TCP). |
2 | Power (W) | Puede limitar el nivel de potencia mecánica del robot. |
3 | Speed (mm/s) | Puede limitar la velocidad del centro de la herramienta (TCP). |
4 | Momentum (kg.m/s) | Puede limitar el impulso del robot. |
5 | Collision (%) | Configura la sensibilidad de detección de colisiones. |
6 | Default Value | Restablece la configuración de los límites del robot/TCP a los valores predeterminados. |
Límites de velocidad articular
Para configurar los límites de velocidad articular, vaya a la celda de trabajo Robot y seleccione Robot > Límites del robot > Velocidad articular. El diseño de la pantalla de configuración de los límites del robot/TCP se compone de lo siguiente:
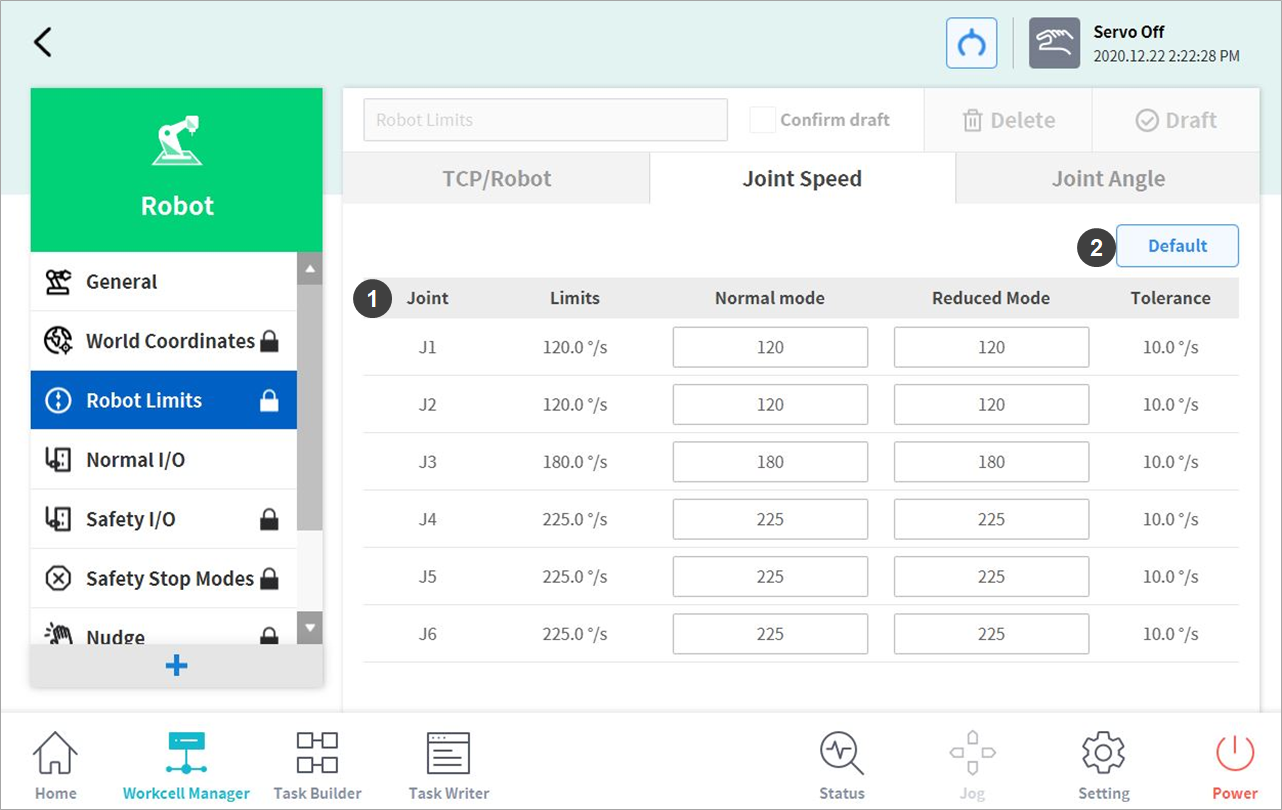
N.º | Elemento | Descripción |
1 | Joint Speed | Puede limitar la velocidad de cada articulación. (J4 no se puede configurar para la serie P) |
2 | Default Value | Restablece la configuración de los límites de velocidad articular a los valores predeterminados. |
Límites del ángulo articular
Para configurar los límites del ángulo articular, vaya a la celda de trabajo Robot y seleccione Robot > Límites del robot > Ángulo articular. El diseño de la pantalla de configuración de los límites del ángulo articular se compone de lo siguiente:
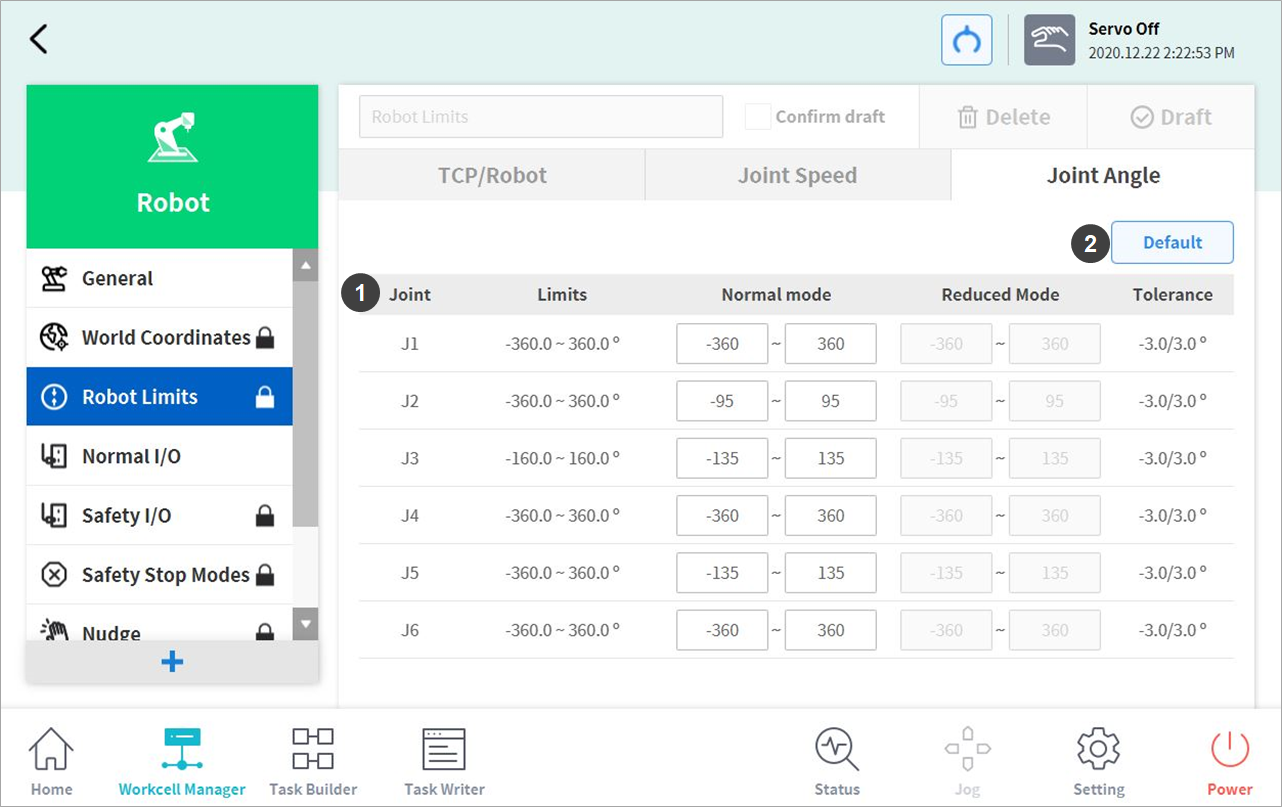
N.º | Elemento | Descripción |
1 | Angle Range of each Joint | Puede limitar el rango de ángulo de cada articulación. (J4 no se puede configurar para la serie P) |
2 | Default Value | Restablece la configuración de los límites del ángulo articular a los valores predeterminados. |