
Nombres y funciones
Manipulator
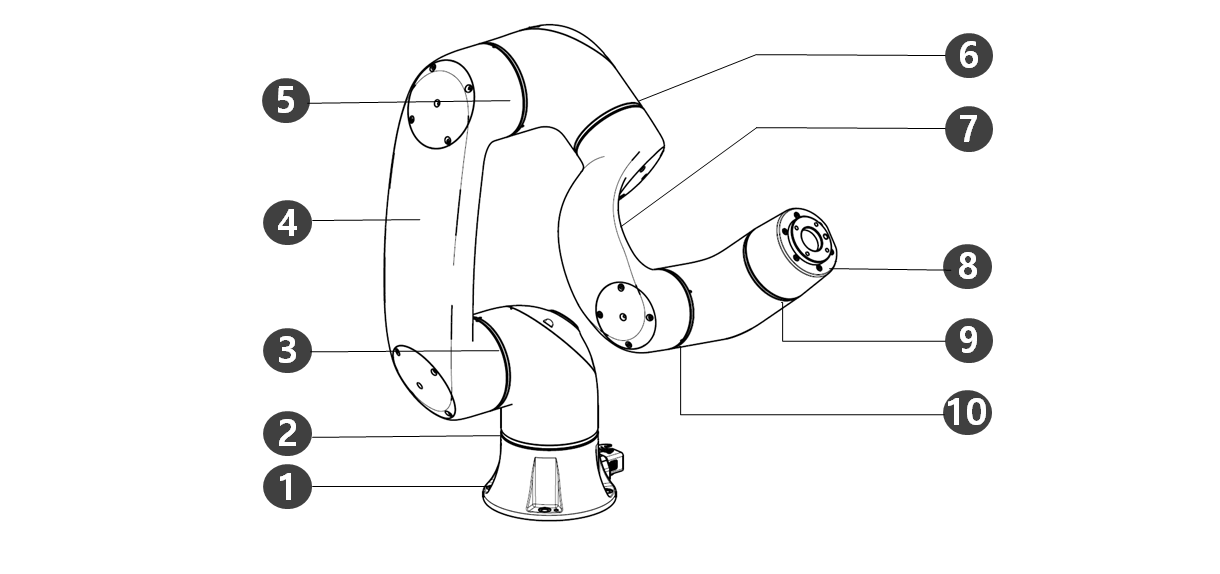
Nombres de las piezas
N.º | Nombre | N.º | Nombre |
|---|---|---|---|
1 | Base | 6 | J4 |
2 | J1 | 7 | Link2 |
3 | J2 | 8 | Tool flange |
4 | Link1 | 9 | J5 |
5 | J3 | 10 | J6 |
Funciones clave
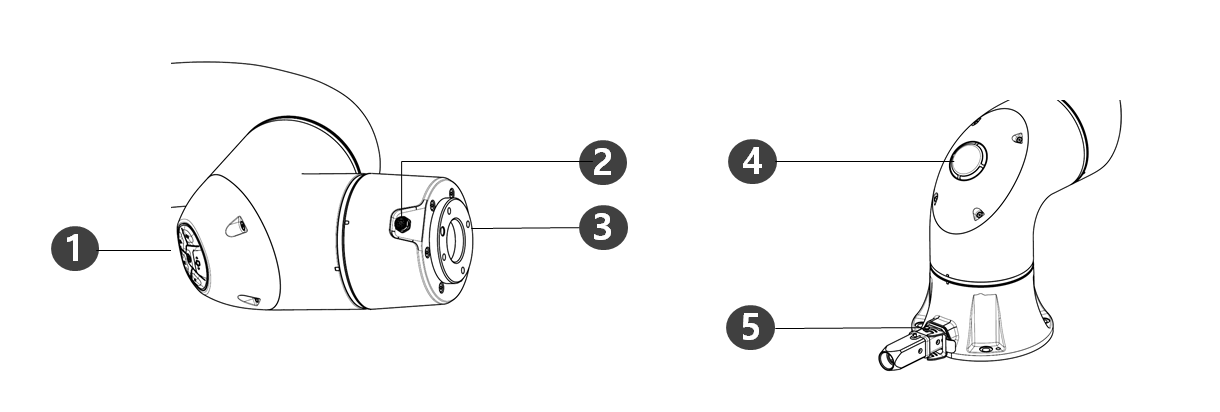
N.º | Elemento | Descripción |
|---|---|---|
1 | Cockpit | [Opción] Controlador que se usa para enseñanza directa y operación. |
| 2 | Flange I/O | Puerto E/S para control de la herramienta. (Entrada digital de 2 canales, salida de 2 canales) |
3 | Tool flange | Área para instalar las herramientas. |
4 | LED (1-axis) | Muestra el estado del robot con diferentes colores. Para obtener más información sobre el estado del robot, consulte Color de LED de estado y de brida para cada modo |
5 | Connector | Se usa para suministrar energía y para la comunicación del robot |
Controlador
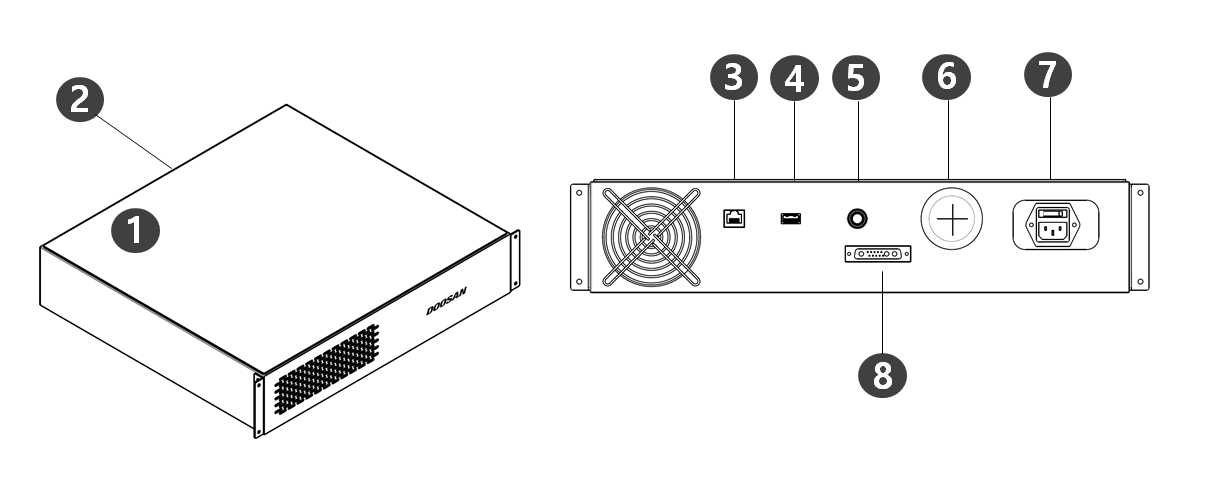
N.º | Elemento | Descripción |
1 | I/O connection terminal (internal) | No es posible la conexión con los controladores de otros robots o equipos circundantes. |
2 | Emergency stop button and Smart Pendant connection terminal | Conecta el botón de parada de emergencia o el cable del Smart Pendant al controlador. |
3 | Network connection terminal | Laptops, equipos TC/IP, equipo Modbus y sensores de visión se pueden conectar al terminal del conector de red dentro de la controlador. |
4 | USB connection terminal | Los registros generados durante la operación del robot se pueden guardar en un dispositivo de almacenamiento USB, o las tareas se pueden exportar o importar. |
5 | Emergency stop button and Smart Pendant connection terminal | Conecta el botón de parada de emergencia o el cable del Smart Pendant al controlador. |
6 | External cable terminal | Terminal que puede conectar dispositivos externos. |
7 | Power connection terminal | Conecta la alimentación al controlador. |
| 8 | Manipulator cable connection terminal | Conecta el cable del manipulador al controlador. |
Botón de parada de emergencia
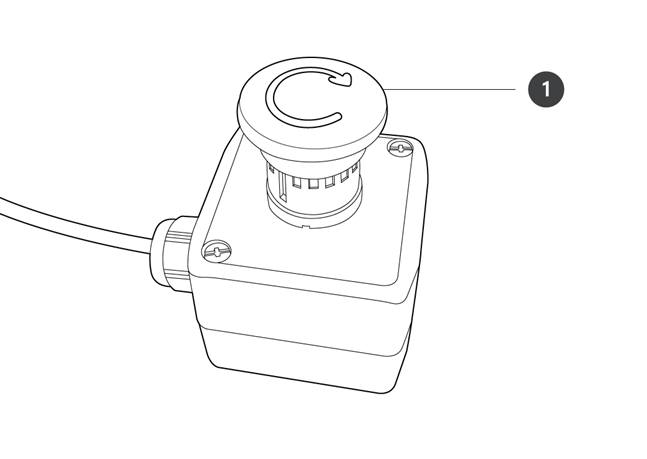
N.º | Elemento | Descripción |
|---|---|---|
1 | Emergency stop button | En caso de emergencia, pulse el botón para detener la operación del robot. |
Smart Pendant
※ El smart pendant no es un elemento estándar sino opcional; por lo tanto, se debe comprar por separado
Para obtener características detalladas del producto, consulte (2.12-es_ES) Apéndice. Smart Pendant (serie A).
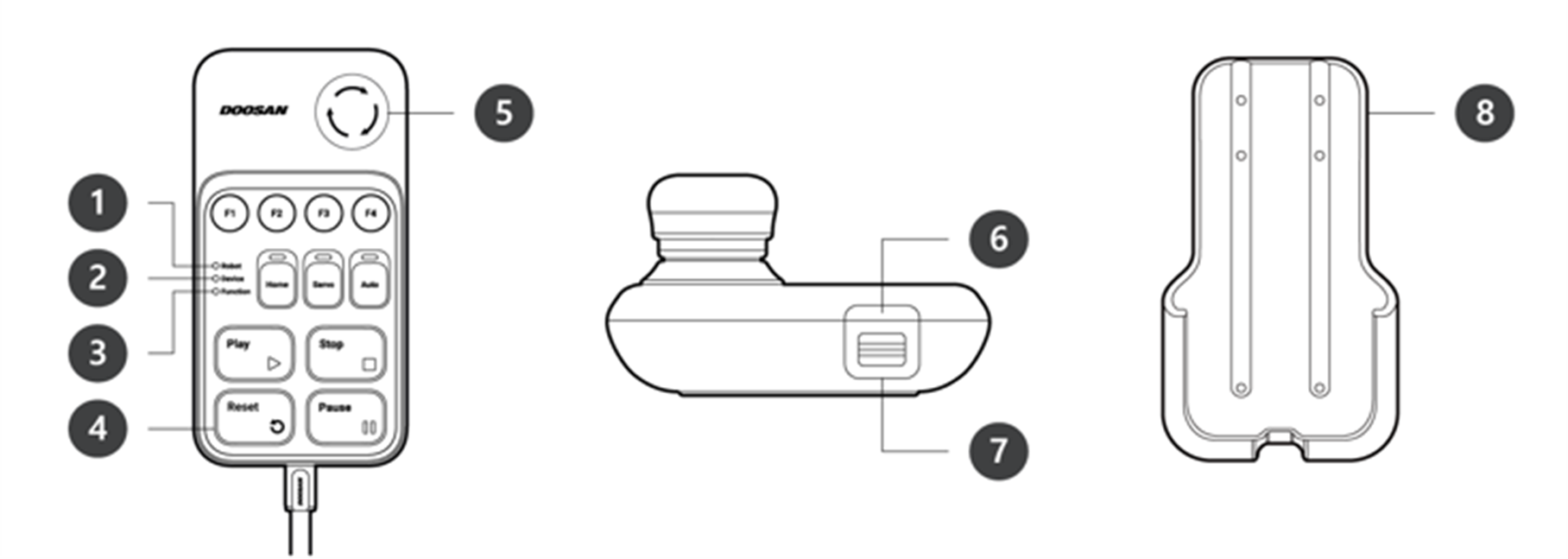
N.º | Elemento | Descripción |
|---|---|---|
1 | Robot LED | Se utiliza para indicar el estado del robot mostrando al usuario el mismo color que el LED de estado del robot. |
2 | Device LED | Se usa para indicar si el sistema ha entrado en el modo smart pendant. |
3 | Function LED | Pulsar cuatro botones de señal de parada (1-F4), enciende el LED que indica el estado del pulsado. |
4 | Buttons | Hay un total de 11 botones, que incluyen cuatro botones de señales de entrada (F1-F4) para cada función, inicio, servo, automático, reproducción, detención, reanudación y pausa. |
5 | Emergency Stop Button | En caso de emergencia, pulse el botón para detener la operación del robot. |
6 | Power Button | Se usa para encender/apagar la alimentación principal de teach pendant. |
7 | Strap Anchor | Se usa para agregar una correa al dispositivo. |
8 | Holder bracket | Instale el soporte de sostén en una pared para almacenar el smart pendant. |
Nota
- Para usar SW V2.8 o superior, coloque la etiqueta Restablecer en el botón Reanudar en el colgante inteligente.
- Si se utiliza una versión inferior a SW V2.8, no es necesario colocar la etiqueta de reinicio. En esa versión, el botón de reanudar en el colgante inteligente funciona como una función de reanudación, no como una función de reinicio.
- La etiqueta puede desprenderse durante el uso, así que tenga cuidado.