Introducción del producto (CS-06)
Nombres y funciones
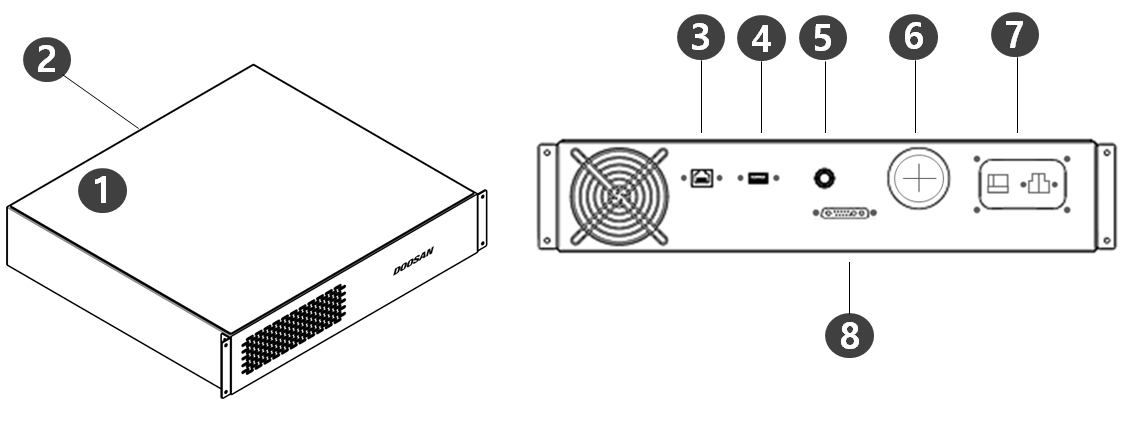
Controlador de CC (CS-06)
N.º | Elemento | Descripción |
1 | I/O connection terminal (internal) | No es posible la conexión con los controladores de otros robots o equipos circundantes. |
2 | Emergency stop button and Smart Pendant connection terminal | Conecta el botón de parada de emergencia o el cable del Smart Pendant al controlador. |
3 | Network connection terminal | Laptops, equipos TC/IP, equipo Modbus y sensores de visión se pueden conectar al terminal del conector de red dentro de la controlador. |
4 | USB connection terminal | Los registros generados durante la operación del robot se pueden guardar en un dispositivo de almacenamiento USB, o las tareas se pueden exportar o importar. |
5 | Emergency stop button and Smart Pendant connection terminal | Conecta el botón de parada de emergencia o el cable del Smart Pendant al controlador. |
6 | External cable terminal | Terminal que puede conectar dispositivos externos. |
7 | Power connection terminal | Conecta la alimentación al controlador. |
| 8 | Manipulator cable connection terminal | Conecta el cable del manipulador al controlador. |
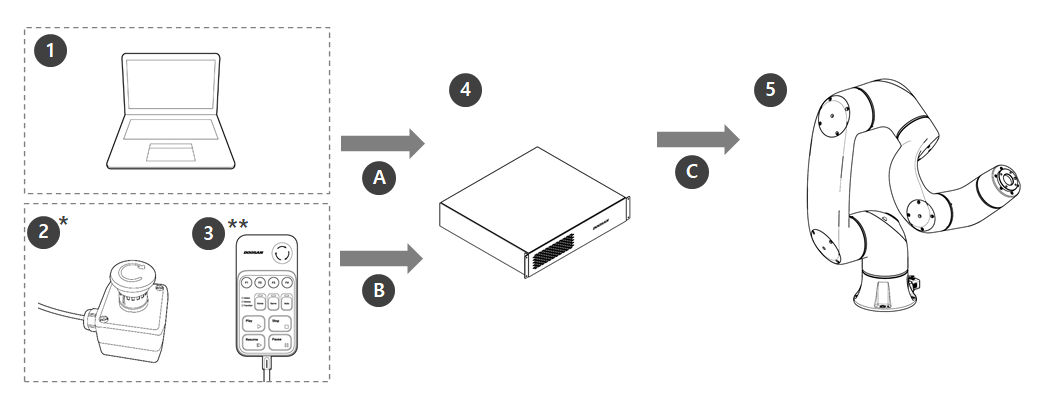
Configuración del sistema
| N.º | Elemento | Descripción |
|---|---|---|
| 1 | Laptop | Después de instalar DART Platform, se puede configurar un entorno de trabajo idéntico al de teach pendant La computadora portátil no está incluida en el paquete, y es necesaria cuando se instala la DART Platform. |
| 2 | Botón de parada de emergencia* | Si se utiliza una laptop como parte del sistema, esta actúa como botón de parada de emergencia del teach pendant |
| 3 | Smart Pendant** | El robot se puede controlar con facilidad mediante un pendant capaz de realizar funciones simples como encender o apagar el servo, o ejecutar o cerrar programas preconfigurados. |
| 4 | Controlador* | Controla el movimiento del robot de acuerdo con la postura o movimiento establecido en el teach pendant. Cuenta con diferentes puertos de E/S que posibilitan la conexión y el uso de varios equipos y dispositivos. |
| 5 | Manipulator* | Es un robot industrial colaborativo que puede realizar tareas de transporte o ensamblaje con varias herramientas |
| A | Command/ Monitoring | |
| B | Command | |
| C | Power Supply/ Network |
- Los elementos se indican como elementos estándar (*) y elementos opcionales (**, se venden por separado)
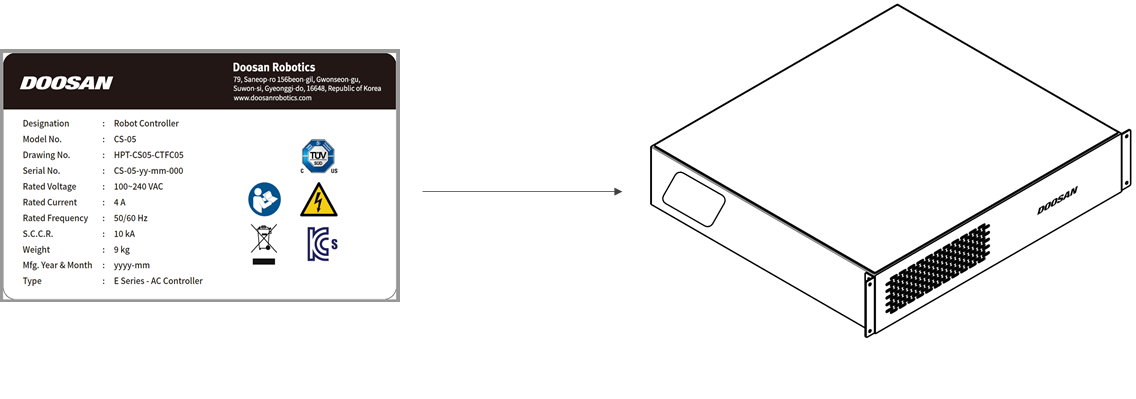
Placa de identificación y etiqueta