
Función de intervención del operador
Si ocurre un problema mientras el robot está en funcionamiento o un usuario emite un comando, el robot deja de funcionar y muestra un mensaje emergente que permite al operador intervenir y resolver la situación. Una vez que el usuario resuelve el problema, la tarea continúa en la línea de programa donde se produjo el problema.
Nota
Para utilizar la función de intervención del operador, debe completar una de las configuraciones siguientes.
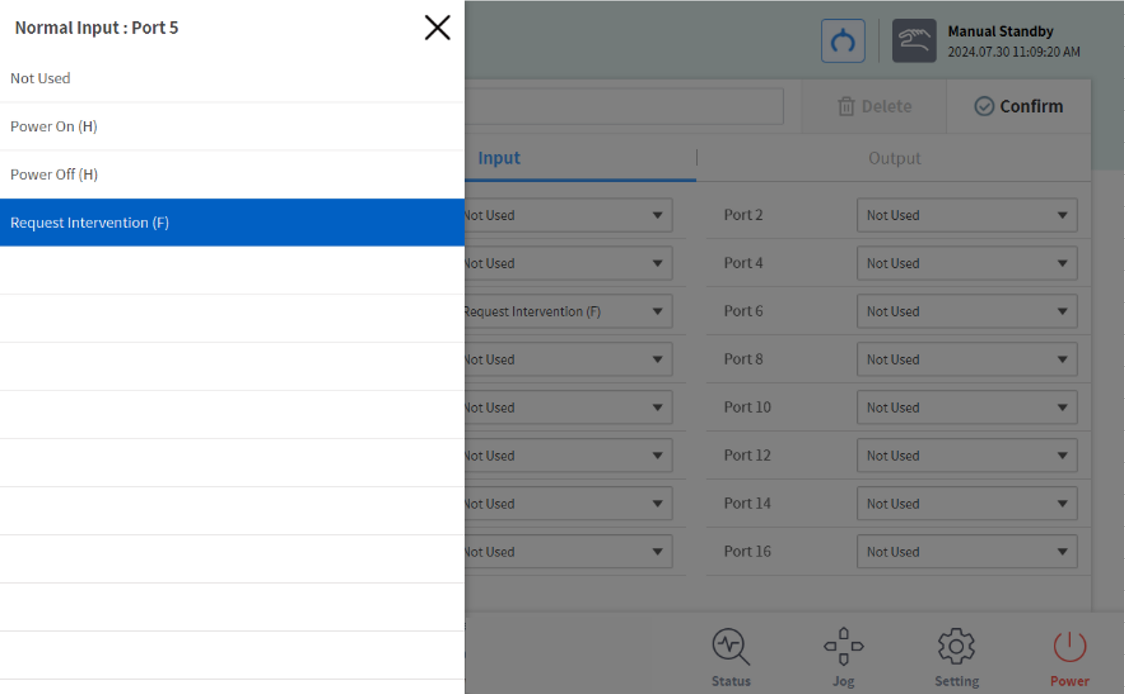
Workcell Manager - Normal I/O - Input - Request Intervention (F)
Workcell Manager - Peripheral - Ananlog Welding Machine - Welding Input Signal
(Para obtener configuraciones detalladas, consulte la Welding Techinical Note.)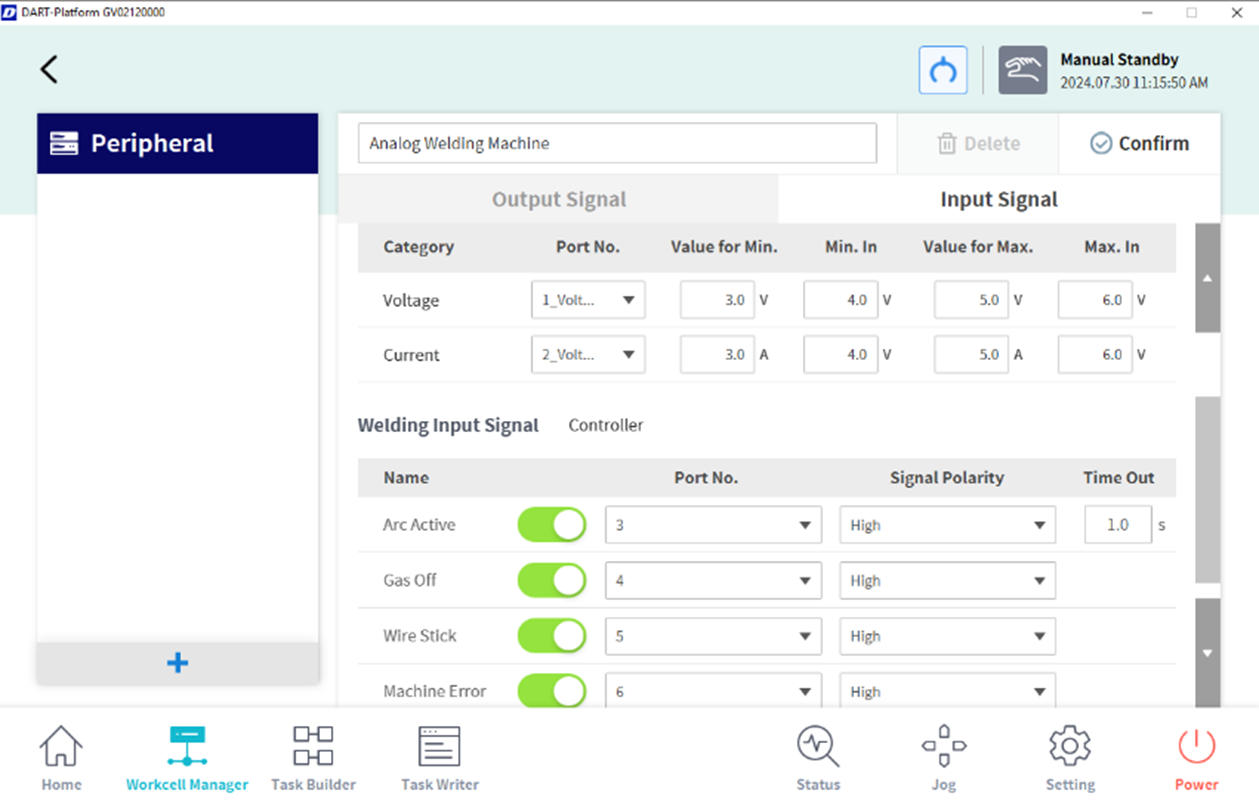
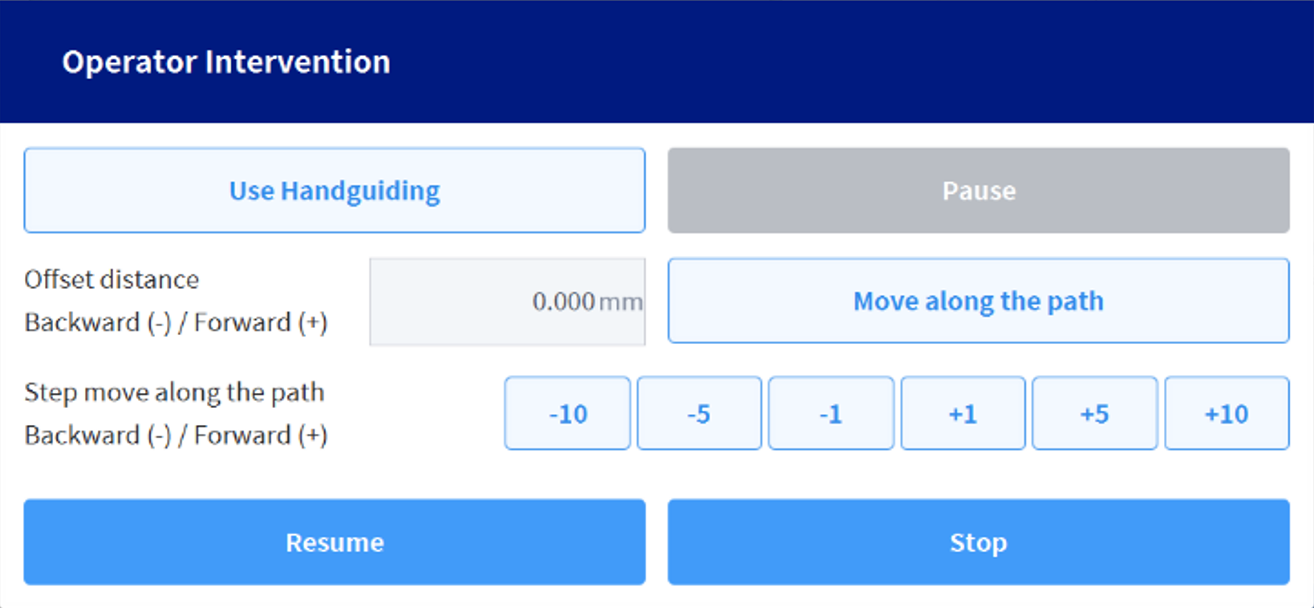
El botón "Mover a lo largo de la ruta" y el botón "Mover por pasos (-10, -5, -1, +1, +5, +10)" realizan la misma acción. Sin embargo, el primero se mueve hacia adelante o hacia atrás desde la posición de referencia según un desplazamiento ingresado manualmente, mientras que el segundo apunta a un punto hacia adelante o hacia atrás según un desplazamiento de paso preestablecido. Después de completar una acción utilizando los botones anteriores, al presionar un botón adicional se moverá la posición actual según el desplazamiento.
El botón “Usar guía manual” se activa solo cuando se configura una Zona colaborativa y el estado del robot cambia al estado de guía manual, lo que permite la enseñanza directa dentro de la Zona. Después de eso, puede activar la enseñanza directa presionando el botón en la parte posterior de la cabina o el colgante de enseñanza.
En el modo de guía manual, el botón “Usar guía manual” cambia al botón “Finalizar guía manual”.
Cuando presiona el botón “Finalizar guía manual”, finaliza el estado de guía manual. En este momento, por razones de seguridad, se comparan la posición actual del robot, el ángulo y los valores del punto de detención (el momento en que se produce la primera ventana emergente) para generar una ventana emergente. Si se produce una ventana emergente con el siguiente contenido, debe volver a enseñar directamente para corregir la posición y la postura del robot e intentarlo nuevamente.
Si la distancia en línea recta entre la posición TCP actual y la posición TCP en la parada difiere en más de 20 cm
Si la diferencia entre el ángulo de articulación actual y el ángulo de articulación en el punto de parada difiere en más de 1~3 ejes (10 grados) / 4~5 ejes (30 grados) / 6 ejes (60 grados)
Esta función solo se admite durante las operaciones MoveL / MoveC / MoveB.
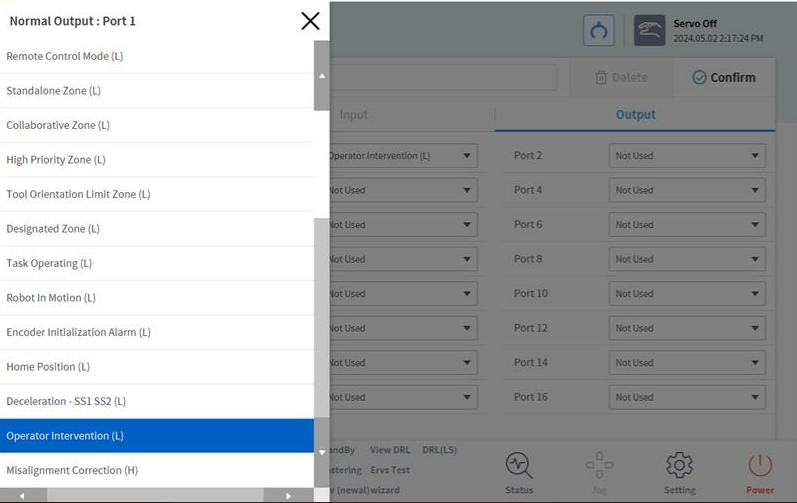
Puede utilizar la función de salida normal para indicar que se ha producido una ventana emergente. La señal permanecerá activa mientras se produce la ventana emergente y se desactivará cuando esta finalice.
Workcell Manager - Normal I/O - Output - Operator Intervention (L)
Este es el escenario de uso:
Reciba una señal de entrada digital del usuario o de un dispositivo conectado mientras se ejecuta el programa.
El robot se detiene y aparece una ventana emergente de intervención del operador.
(Si utiliza la enseñanza directa) Pulse el botón Usar guía manual y, a continuación, pulse el botón en la parte posterior de la cabina o del dispositivo de enseñanza colgante para activar la enseñanza directa. Una vez completada la operación de enseñanza directa, pulse el botón Finalizar guía manual.
Pulse el botón Mover a lo largo de la ruta para mover el robot a lo largo de la ruta.
Después de mover el robot tanto como desee, pulse el botón Reanudar para reanudar la tarea del robot y cerrar la ventana emergente.