
Ejecución basada en la articulación
Para ajustar el ángulo en base a la articulación del robot, siga los siguientes pasos:
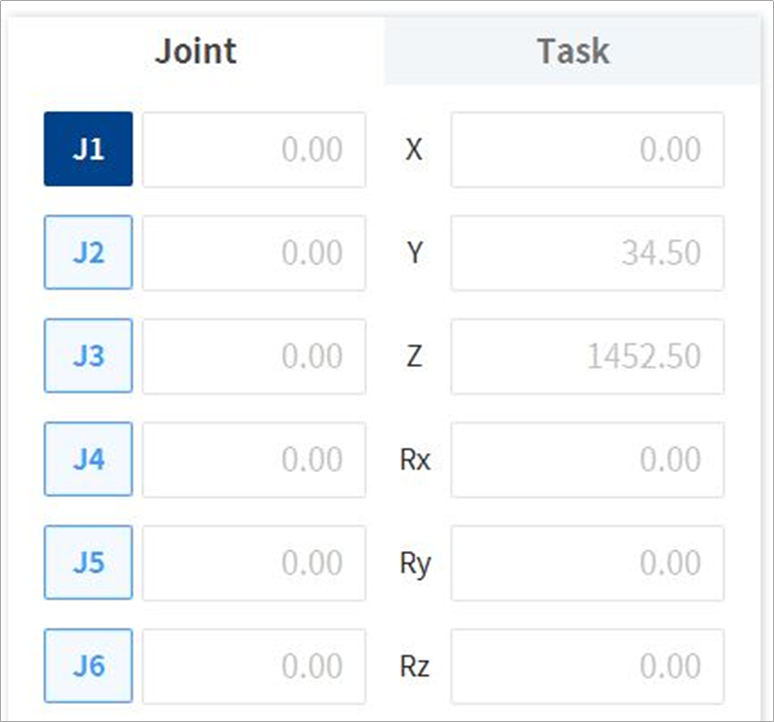
Seleccione la pestaña Articulación en la pantalla Articulación.
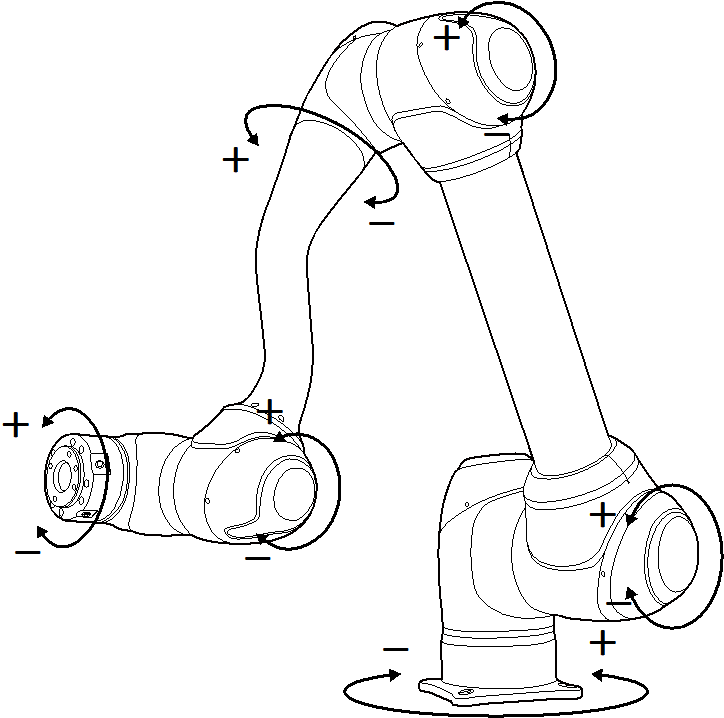
Seleccione el eje (J1-J6) para ajustar el ángulo.
Mantenga presionado el botón de dirección (


Nota
Las zonas de seguridad no se aplican en modo virtual.