
Configuración del centro de la herramienta
Al configurar el punto central de la herramienta (TCP), también se debe definir la posición y el ángulo de rotación en función de las coordenadas de la brida. La distancia desde el punto inicial predeterminado de las coordenadas de la brida hasta el punto central de la herramienta (TCP) en las direcciones X, Y y Z no se puede establecer en más de 10000 mm. Además, si las longitudes convertidas ( 
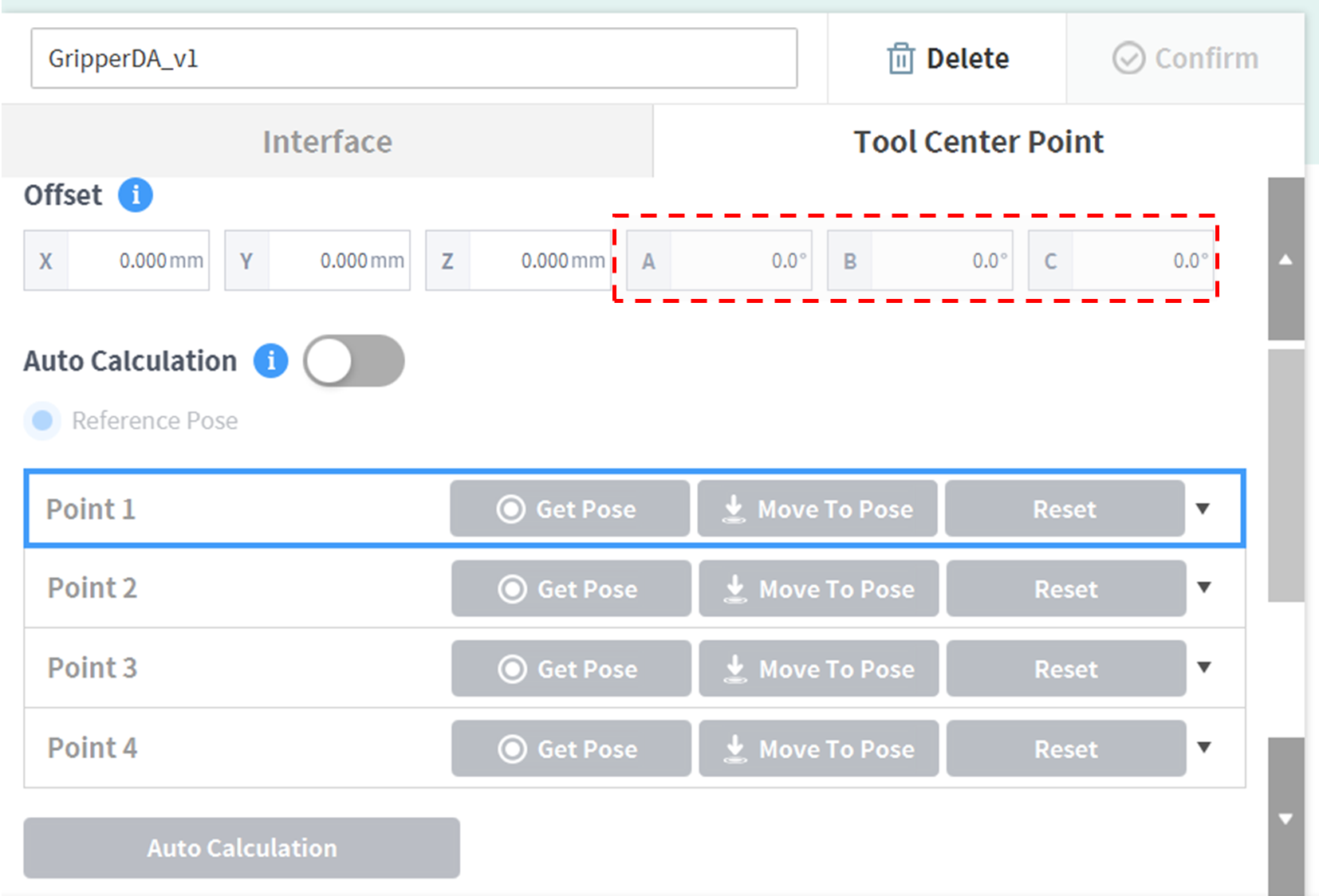
En particular, si el TCP se configura usando Auto Calculate, el cálculo se realiza basándose únicamente en las posiciones X, Y y Z, por lo que es necesario ingresar el ángulo de rotación. El ángulo de rotación se puede definir con los elementos A, B y C, y se basa en el método de rotación Z-Y-Z de Euler.
Las definiciones del eje de coordenadas expresado con x, y, z y el eje de coordenadas expresado con X, Y, Z son las siguientes:
- Eje de coordenadas de la “Coordenada de brida” (x, y, z): La dirección del eje de coordenadas definida en el extremo de la brida es idéntica a la coordenada del robot con un ángulo articular del robot de (0,0,0,0,0,0).
- Eje de coordenadas de la “Coordenada de TCP” (X,Y,Z): El eje de coordenadas se define en el extremo de la herramienta instalada en el extremo de la brida o punto de trabajo. El ángulo de rotación de la “Coordenada de TCP” se define basado en la “Coordenada de brida” siguiendo el orden 1) a 3) de lo siguiente:
1) Rotar A grados sobre el eje z de la Coordenada de brida
2) Rotar B grados sobre el eje y’ de la coordenada rotada según 1)
3) Rotar C grados sobre el eje z’’ de la coordenada rotada según 2)
Estos son algunos ejemplos de configuración del TCP según el método que se describe más arriba:
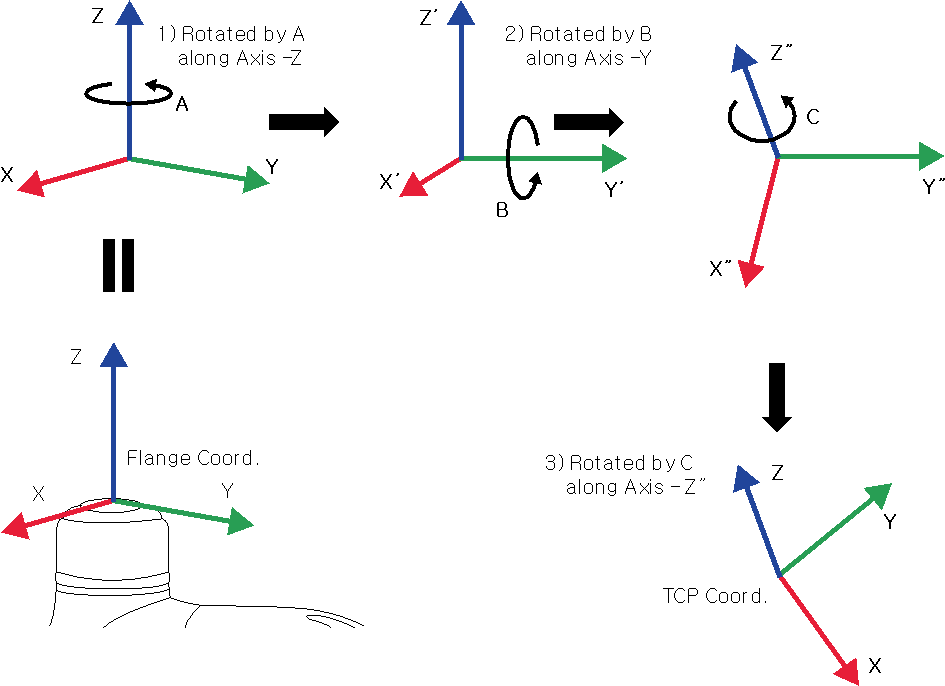
- [X, Y, Z, A, B, C] = [0, 0, 100, 0, 0, 0]: Pinza general con desplazamiento en la dirección Z (Coord. TCP)
- [X, Y, Z, A, B, C] = [100, 0, 300, 180, -45, 0]: Pinza izquierda con ángulo de 45 grados (Coord. TCP L)
- [X, Y, Z, A, B, C] = [-100, 0, 300, 0, -45, 0]: Pinza derecha con ángulo de 45 grados (Coord. TCP R)