
Conexión de E/S de la Controlador
Además del manipulador y teach pendant, se pueden conectar varios equipos externos a la controlador a través del terminal de E/S de la controlador. Se pueden conectar varios periféricos, como dispositivos de seguridad, incluido el interruptor de parada de emergencia, cortinas de luz y tapetes de seguridad, y los dispositivos necesarios durante la configuración de la celda de trabajo del robot, incluidos las válvulas solenoides neumáticas, los relés, los PLC y los codificadores de cinta transportadora.
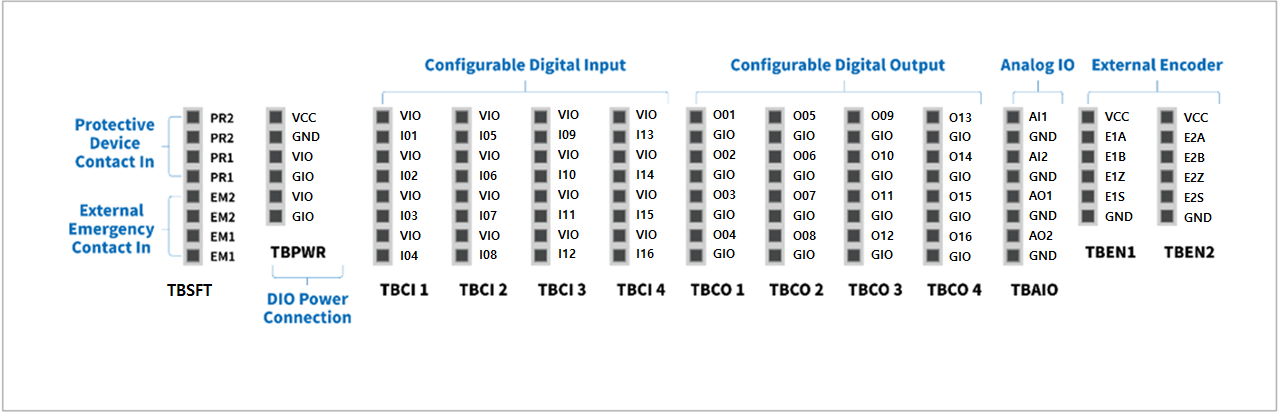
La E/S de la controlador consta de las siguientes seis unidades:
Bloque de terminales para entrada de contacto Safety (TBSFT): Se usa para conectar los dispositivos necesarios para la parada de emergencia y la parada de protección
Bloque de terminales para alimentación de E/S digital (TBPWR):
Bloque de E/S digital Configurable (TBCI1- 4, TBCO1– 4): Se usa para conectar los periféricos necesarios para la operación del robot
Bloque de terminales para E/S analógica (TBAIO):
Bloque de terminales para la entrada del codificador (TBEN1, TBEN2)
El siguiente gráfico muestra el diseño de la interfaz eléctrica del interior de la controlador.
Para la serie E, la ubicación del terminal de E/S se puede confirmar abriendo la cubierta del controlador como se muestra en la foto del controlador interno a continuación.

Precaución
Apague la alimentación cuando conecte terminales a la E/S de la controlador para evitar daños y averías en el producto.
Doosan Robotics no compensará ningún daño al producto causado por una conexión de terminales inapropiada o negligencia del usuario.
Asegúrese de apagar la fuente de alimentación externa cuando apague la controlador.
Al aflojar o apretar el perno, para evitar pérdidas, asegúrese de utilizar una herramienta magnética.