
Liberación de la detención debido a infracciones de límite de espacio y zona
Cuando se intenta activar el servo después de detener el robot debido a infracciones de límite de espacio y zona, se establece el servo activado con los siguientes mensajes de alarma mostrados.
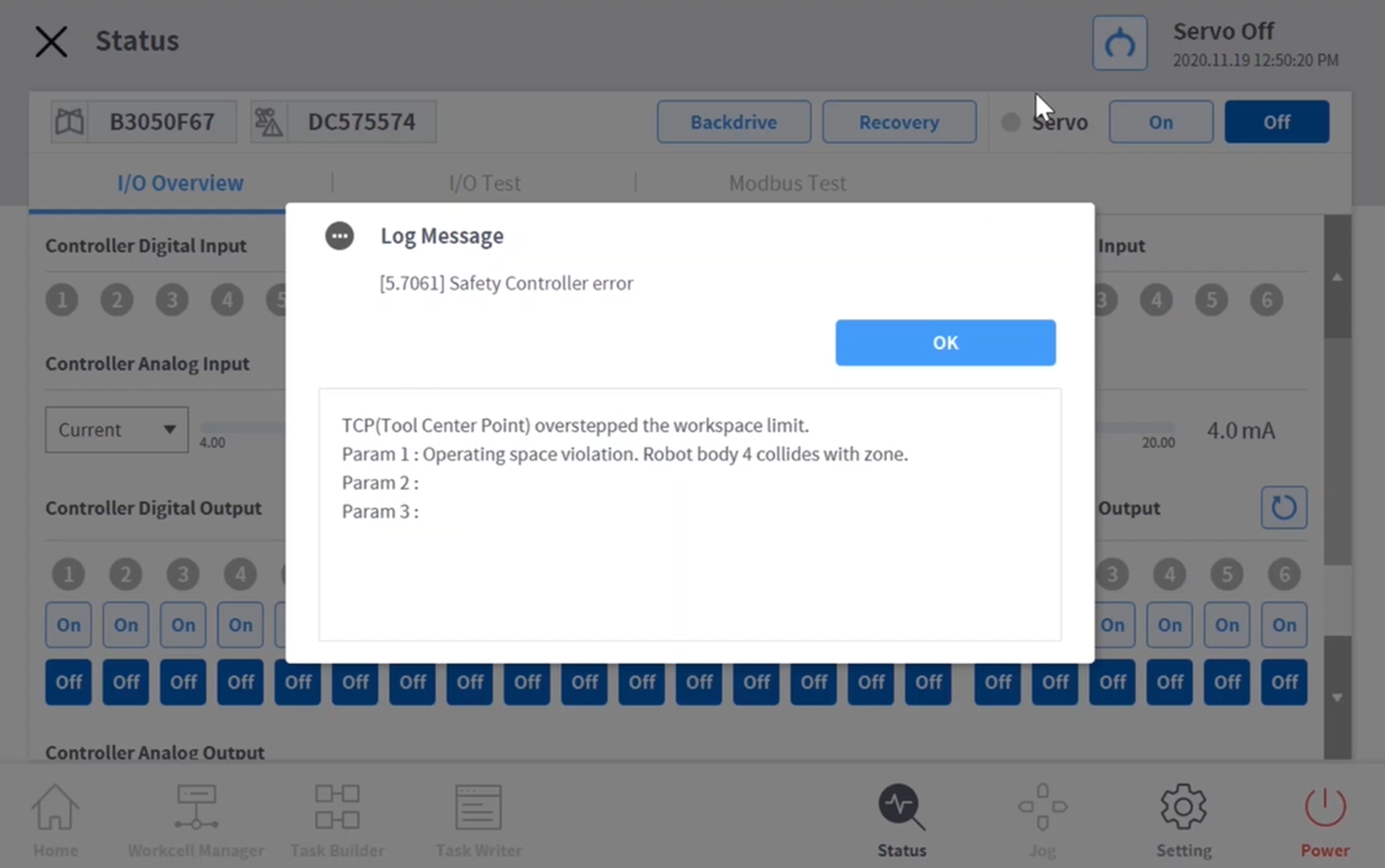
Si el robot se ha detenido debido a infracciones del límite de espacio y de la zona, utilice la función Estado > Recuperación de seguridad > Recuperación de softwarepara mover el robot a un área segura. El siguiente ejemplo muestra cómo mover el robot a un área segura utilizando la función de recuperación de software.
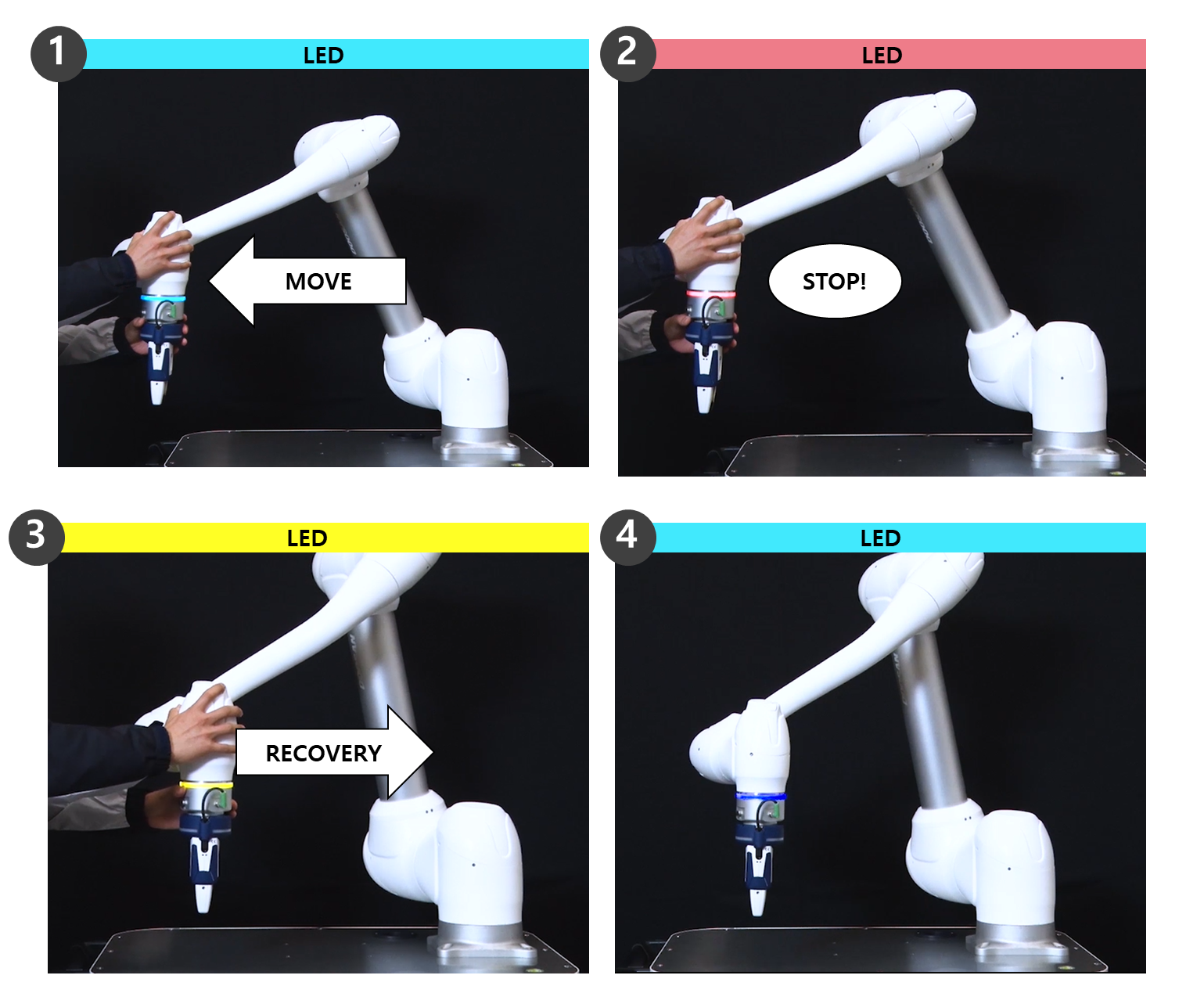
- El robot se mueve libremente en la zona de trabajo durante el trabajo.
- Estado del robot: Servo activado
- LED: Cian
- El robot se detiene cuando sale de la zona de trabajo.
- Estado del robot: Servo desactivado
- LED: Rojo
- Configure Servo en Estado > Recuperación de seguridad > Recuperación de seguridad del softwarey mueva el robot a un área segura.
- Estado del robot: Servo activado (modo de recuperación)
- LED: Amarillo
- Salga de la pantalla de recuperación de seguridad y pulse Estado > Servo activado, y el robot reanudará el funcionamiento normal.
- Estado del robot: Servo activado
- LED: Cian
Para obtener más información acerca de la recuperación de seguridad del software, consulte Uso del modo de recuperación del software.