Forma de zona y límite de espacio
Las formas de Límite de espacio / Zona se establecen de acuerdo a lo siguiente:
Elemento | Descripción | |
|---|---|---|
Cuboid | La forma de Límite de espacio / Zona se establece como cuboide.
| |
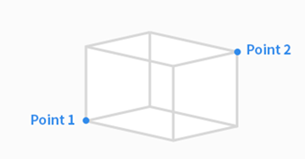
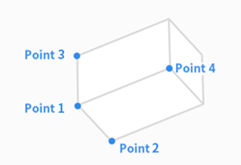
Tilted Cuboid | La forma de Límite de espacio / Zona se establece como cuboide inclinado. Ajuste por 4 puntos
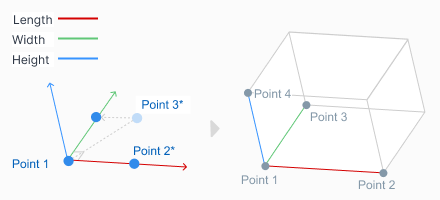
Ajuste por 3 Puntos y Altura Introduzca el punto de referencia (Punto 1), el punto en el eje x (Punto 2) y el punto en el plano xy (Punto 3). Una vez determinados el punto de referencia y las direcciones de los tres ejes, se puede especificar el tamaño del cuboide inclinado estableciendo el largo, el ancho y el alto. El cuboide inclinado se puede mover en paralelo (traslación paralela) estableciendo el desplazamiento x, y y z.
| |
Cylinder | La forma de Límite de espacio / Zona se establece como cilíndrica.
| |
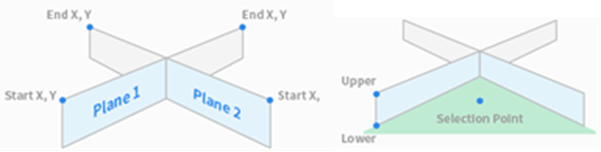
Multi-plane Box | La forma de Límite de espacio / Zona se establece como caja multiplano.
| |
Sphere | La forma de Límite de espacio / Zona se establece como esfera.
| |