
Elemento de célula de trabajo - Añadir posición de instalación del robot (montaje)
OPCIONAL FÁCIL 3 MIN
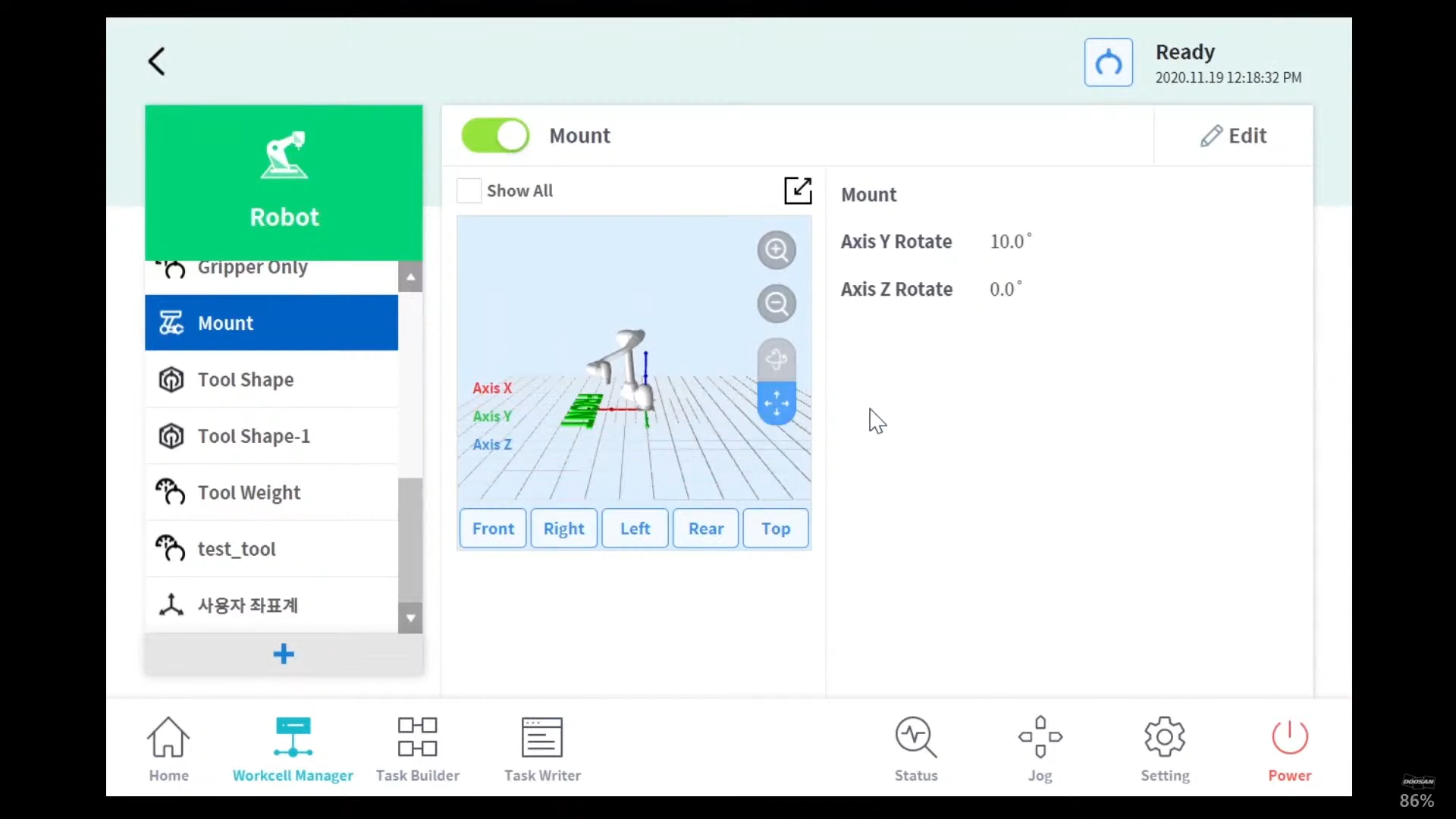
La posición de instalación del robot se puede ajustar añadiendo un elemento de célula de trabajo de posición (montaje) de instalación del robot. Si el robot está instalado en una superficie plana, este paso se puede omitir.
La posición de instalación del robot se puede ajustar mediante el Administrador de células de trabajo > Robot > 
- El ángulo de instalación se puede medir mediante la función de medición automática. Sin embargo, si el ángulo es inferior a 5 grados, la medición automática no estará disponible.
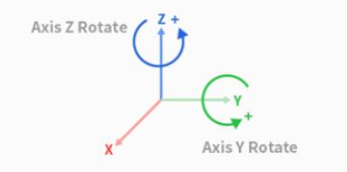
- Si el robot está instalado en el techo o en la pared, el ángulo de instalación del robot se puede ajustar con las rotaciones del eje Y y del eje Z.
- Como el cálculo automático del peso de la herramienta se realiza en función de la gravedad, se recomienda restablecer el peso de la herramienta una vez que se haya realizado el ajuste de montaje.
Una vez registrado (confirmado) el elemento de celda de trabajo, el interruptor de alternar debe estar activado para poder utilizar el elemento de celda de trabajo.
Precaución
- Al configurar el elemento de célula de trabajo de pose (montaje) de instalación del robot, se recomienda cambiar también las coordenadas del mundo. Si no se cambian las coordenadas del mundo, la posición del robot en la pantalla del simulador del robot de la unidad de programación se muestra como el robot que se está instalando en la superficie plana (básico).