
Ejecución según la herramienta del robot
Para mover el robot basándose en la herramienta del robot, siga estas indicaciones:
Seleccione la pestaña Tarea en la pantalla Avance.
Seleccione Base o Geográfica como coordenadas de visualización y configure la Herramienta según el punto de referencia de las coordenadas de la tarea.
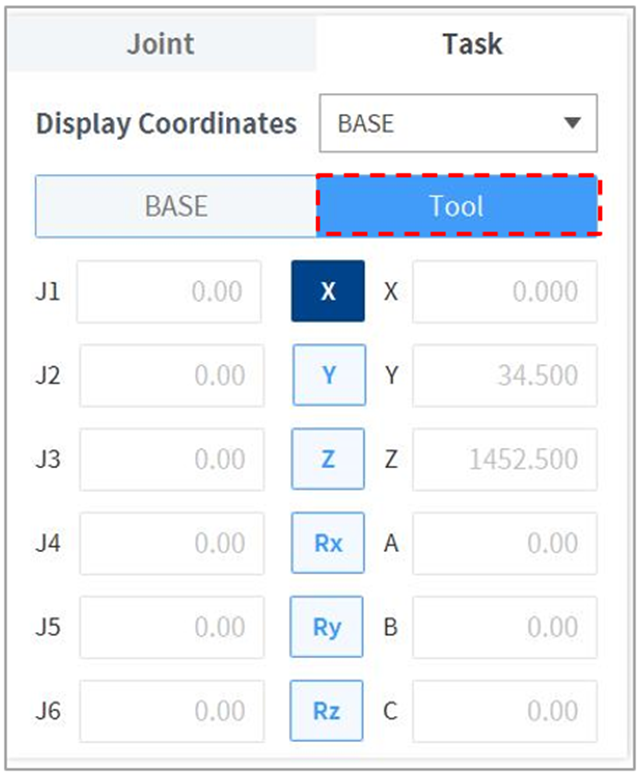
Seleccione las coordenadas de la herramienta a mover.
Mantenga presionado el botón de dirección (


Nota
Las zonas de seguridad no se aplican en modo virtual.
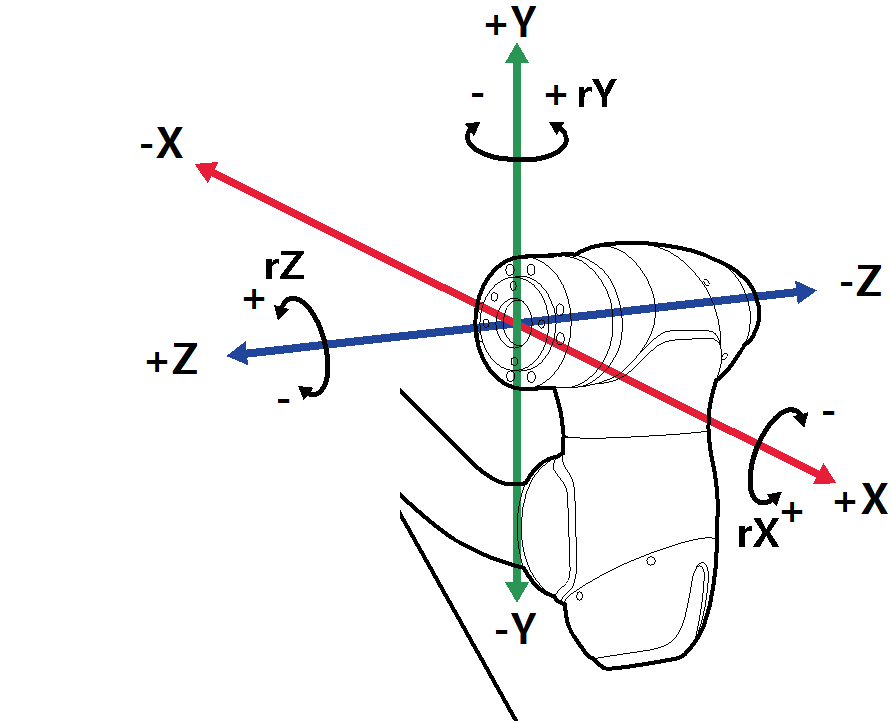
Rx, Ry y Rz se ejecutan según TCP (posición del centro de la herramienta).