
Brida E/S
La cubierta de la brida del extremo del robot tiene un conector M8 específico de 8 clavijas. Consulte el gráfico a continuación para obtener información sobre la ubicación y la forma.
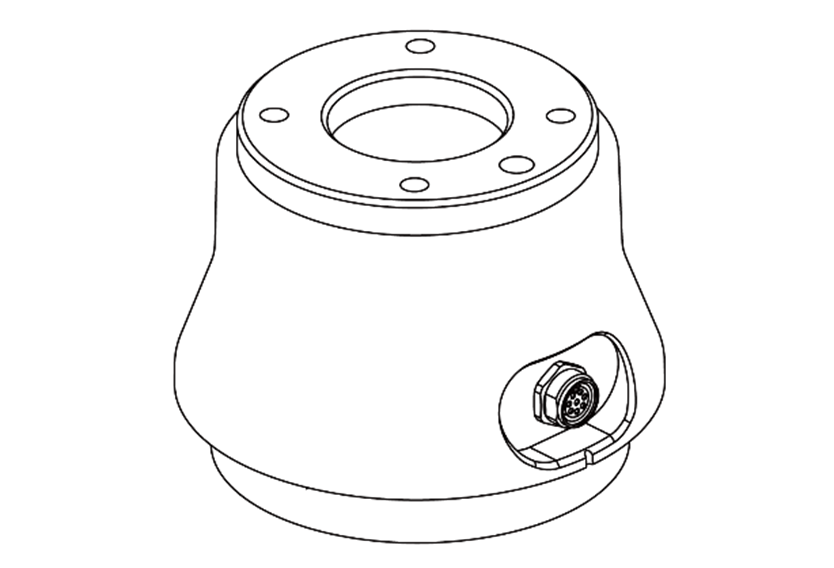
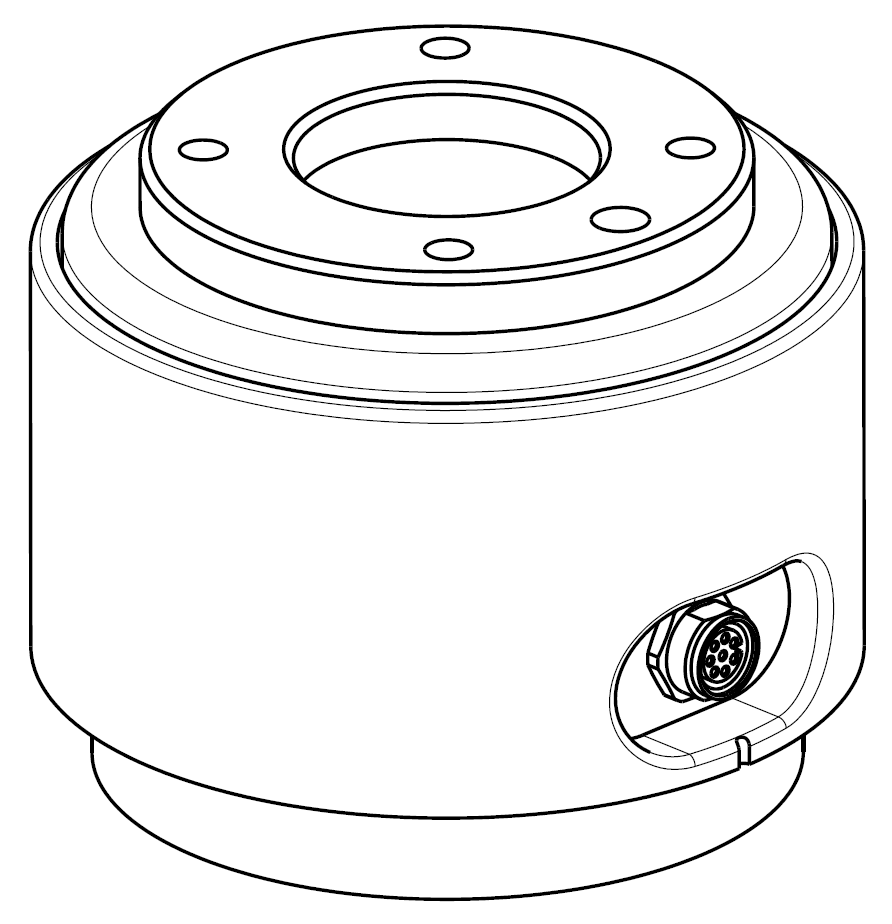
Los productos fabricados a partir de agosto de 2022 han cambiado su apariencia y la dirección del conector, como se muestra en la figura a continuación.
El conector suministra energía y las señales de control necesarias para operar la gripper (pinza) o los sensores integrados en herramientas específicas del robot. Los siguientes son cables industriales de muestra (se pueden usar cables equivalentes):
- Phoenix contact 1404178 (recto)
- Phoenix contact 1404182 (ángulo recto)
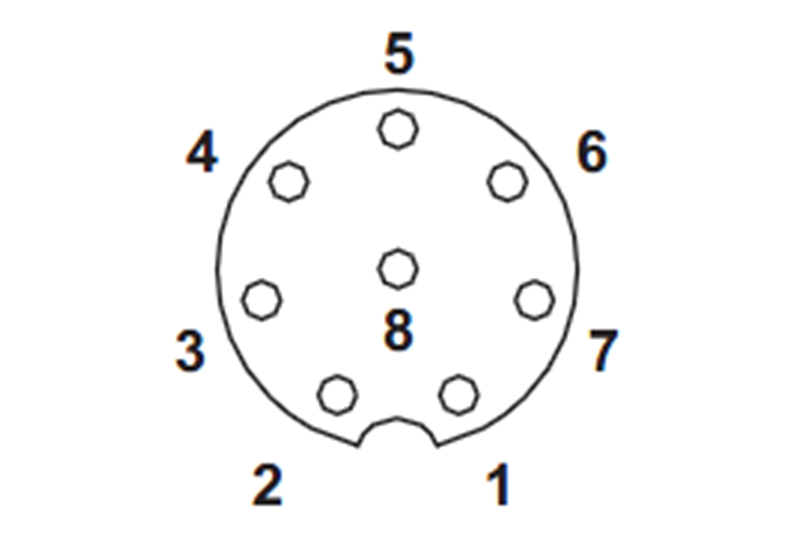
El plano de pines de cada conector es el siguiente:
Schematic Diagram
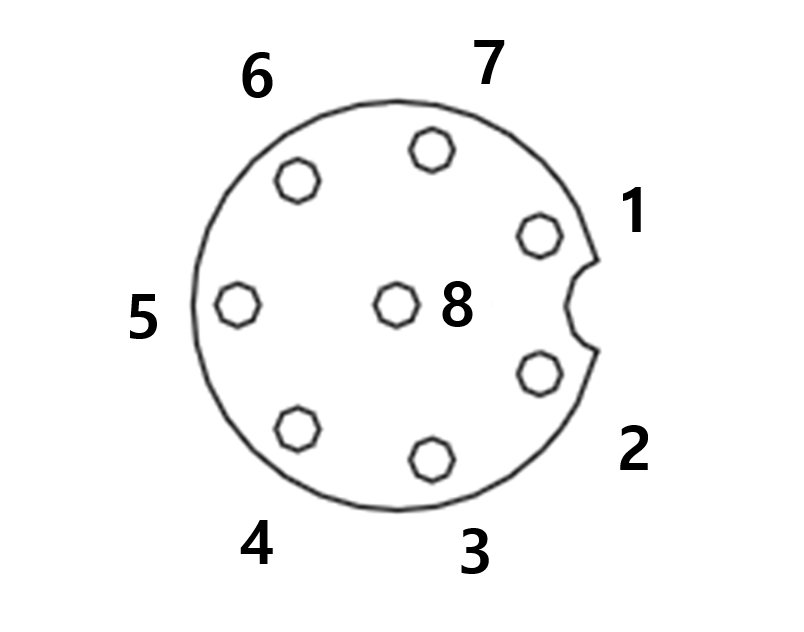
productos fabricados a partir de agosto de 2022, la orientación del conector se ha cambiado como se muestra en la siguiente figura.
Las funciones de E/S proporcionadas por el conector X1 son diferentes. Consulte el gráfico a continuación para obtener detalles sobre las configuraciones de E/S.
Configuración X1 (E/S digital, RS 485)
No | Signal type | Description | Note |
1 | RS485 A | Velocidad máxima de baudios de 1M | Mfg date 6 juli 2020 ~ 21 januari 2021 |
2 | RS485 B | Velocidad máxima de baudios de 1M | |
3 | Digital Output 1 | configurado en PNP (tipo de fuente, predeterminado) o NPN (tipo de sumidero) | |
4 | Digital Output 2 | configurado en PNP (tipo de fuente, predeterminado) o NPN (tipo de sumidero) | |
5 | Power | +24V | |
6 | Digital Input 2 | PNP (tipo de fuente, predeterminado) | |
7 | Digital Input 1 | PNP (tipo de fuente, predeterminado) | |
8 | GND |
Configuración X1 (E/S digital, RS 485)
De instelling is sinds 21 januari 2021 als volgt gewijzigd.
No | Signal type | Description | Note |
1 | Digital Input 1 | PNP (tipo de fuente, predeterminado) | Mfg date Voor 6 juli 2020 Mfg date Na 21 januari 2021 Andere serienummers toegepast VMA6F5-A0509S WAA6H7-A0912 WAA6H8-A0912 |
2 | Digital Output 1 | configurado en PNP (tipo de fuente, predeterminado) o NPN (tipo de sumidero) | |
3 | Digital Output 2 | configurado en PNP (tipo de fuente, predeterminado) o NPN (tipo de sumidero) | |
4 | RS485 A | Velocidad máxima de baudios de 1M | |
5 | Power | +24V | |
6 | RS485 B | Velocidad máxima de baudios de 1M | |
7 | Digital Input 2 | PNP (tipo de fuente, predeterminado) | |
8 | GND |
Advertencia
- Configureer tools en grijpers na controle van de I/O-configuratie op basis van productiedatum (robot labal mfg datum).
- U kunt het vinden op Doosan Robotlab. (https://robotlab.doosanrobotics.com)
- Als u robottools uitvoert en de I/O-configuratie negeert, kan het product permanente schade oplopen.
La alimentación interna de la E/S de la brida está configurada en 24 V. Consulte la tabla a continuación para obtener especificaciones detalladas de la potencia durante la conexión de E/S.
Parameter | Min | Typ | Max | Unit |
Supply voltage | - | 24 | - | V |
Supply current | - | - | 3 | A |
Digital output | - | 6 | - | EA |
Digital input | - | 6 | - | EA |
El entorno ha sido cobrado de la siguiente manera desde el 22 de marzo de 2024.
Configuración X1
No | Signal type | Description |
|---|---|---|
1 | Digital Input 1 | PNP (tipo de fuente, predeterminado) |
2 | Digital Output 1 | configurado en PNP (tipo de fuente, predeterminado) o NPN (tipo de sumidero) |
3 | Digital Output 2 | configurado en PNP (tipo de fuente, predeterminado) o NPN (tipo de sumidero) |
4 | Analog Input 1 / RS-485 + | configurado en Voltaje (0-10 V) o Corriente (4-20 mA, predeterminado) / Velocidad máxima de baudios de 1M |
5 | Power | Configure la fuente de alimentación interna en +24 V (predeterminado), +12 V o 0 V. |
6 | Analog Input 2 / RS-485 - | configurado en Voltaje (0-10 V) o Corriente (4-20 mA, predeterminado) / Velocidad máxima de baudios de 1M |
7 | Digital Input 2 | PNP (tipo de fuente, predeterminado) |
8 | GND |
Configure la fuente de alimentación interna en 24V, 12V o 0V.
Las especificaciones eléctricas se muestran a continuación:
| Parameter | Min | Typ | Max | Unit |
|---|---|---|---|---|
| Supply voltage (12V mode) | 11.4 | 12 | 12.6 | V |
| Supply voltage (24V mode) | 22.8 | 24 | 25.2 | V |
| Supply current | - | - | 3 | A |
Advertencia
- Instale la herramienta y la pinza de manera que no causen ningún peligro cuando se corta la corriente.
(Por ejemplo, workpiece que se cae de la herramienta)
- El terminal n.º 5 de cada conector emite 24 V en todo momento mientras se suministra energía al robot, así que asegúrese de cortar la fuente de alimentación al robot cuando configure la herramienta y la pinza.