Arranque del sistema
Después de encenderse, el sistema arranca. Una vez completado el proceso de arranque, la aplicación del sistema se muestra en el teach pendant. Para obtener más información acerca de la aplicación del sistema, consulte “ Configuración de la pantalla del programa”.
En el caso de DART-Platform (para Windows),
- Ejecute la plataforma DART instalada en la computadora de escritorio o portátil.
- Espere unos 5 minutos hasta que el controlador del robot termine de iniciarse.
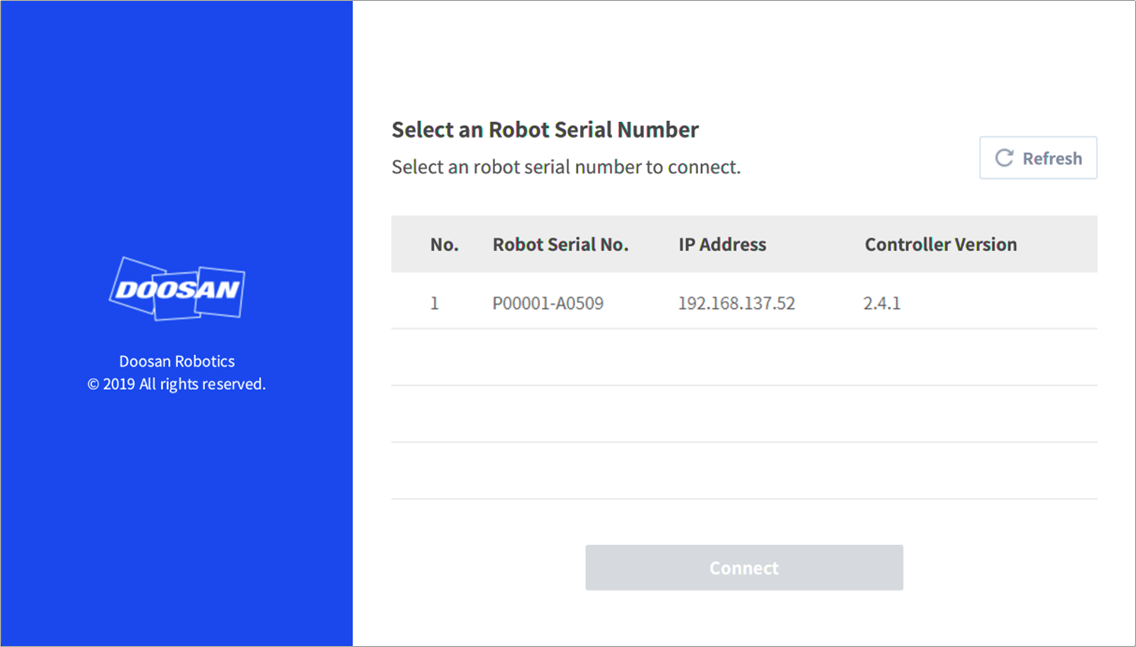
- Cuando se busque la IP, verifique el número de serie del conectado a la red.
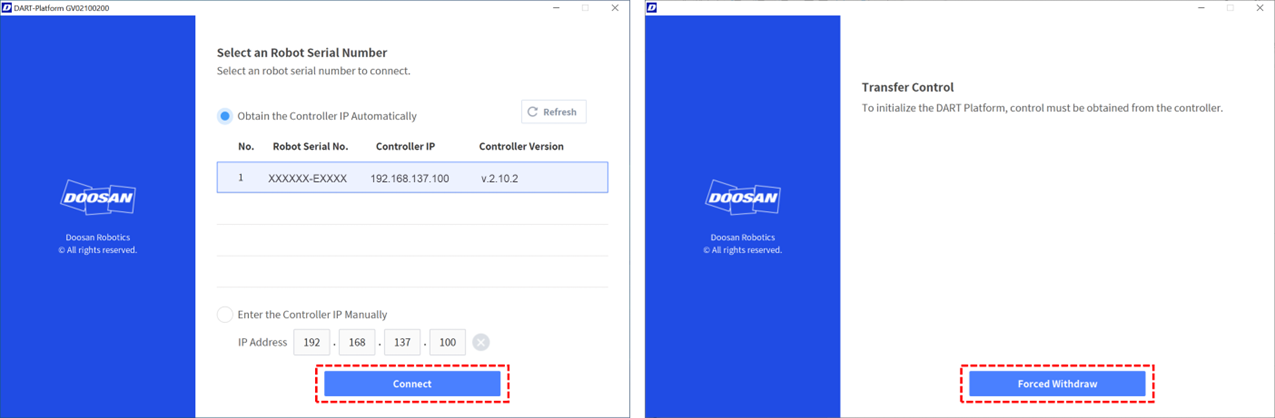
- Seleccione el robot que desea conectar y haga clic en el botón 'Conectar'.
- Pulse el botón Forzar recuperación para transferir el control.
Nota
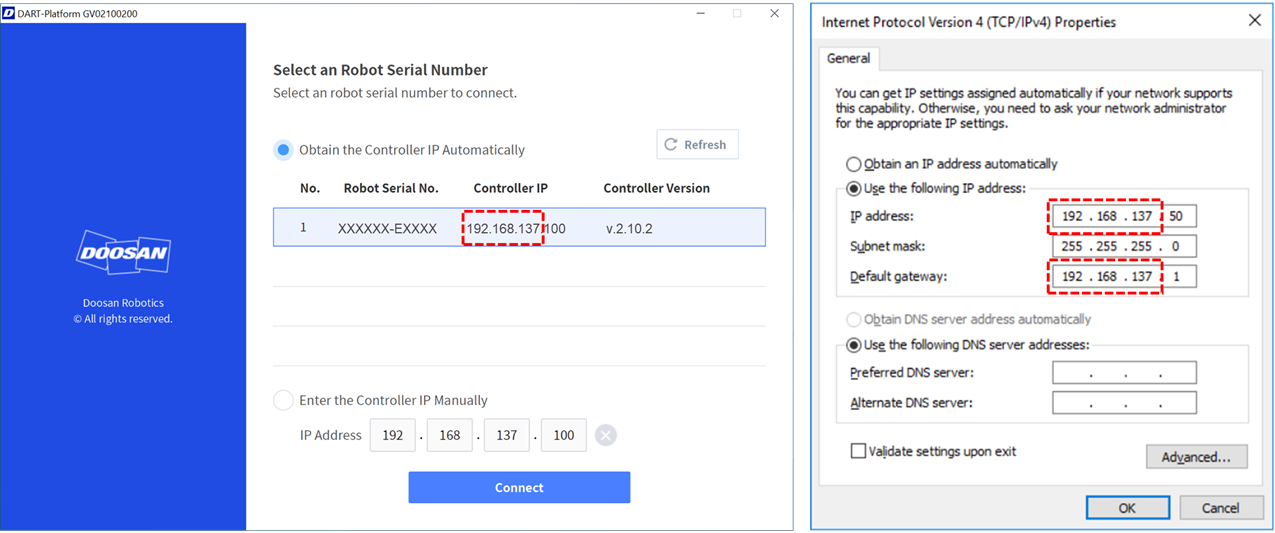
Si no hay conexión entre el controlador y DART-Platform, cambie la banda de clase C de la dirección IP y la puerta de enlace predeterminada de la computadora de escritorio o portátil con DART-Platform instalado a la banda de clase C de la dirección IP del controlador y vuelva a intentarlo.
Si no se busca la IP, seleccione 'Ingresar la IP del controlador manualmente' y continúe con la conexión. La dirección IP predeterminada del controlador se establece en 192.168.137.100.
Si el retiro forzado del control continúa fallando, verifique lo siguiente:
Cierra el programa y reinicia.
Asegúrese de que los botones de parada de emergencia no estén presionados.
Si uno o más pares de entradas digitales del controlador están designados para la parada de emergencia/parada de emergencia remota/señal STO (activo bajo) en la configuración de E/S de seguridad, asegúrese de que todas las señales designadas estén desactivadas ( Alto).
Compruebe si el controlador ha terminado de iniciarse.
Compruebe el estado del robot. En el caso de Control remoto, Recuperación o Backdrive, la ejecución de la plataforma DART puede fallar.
Nota
- Servo encendido: Para cambiar la postura del robot, el robot debe estar en estado servo encendido donde la alimentación se suministra a las articulaciones del robot y este se encuentra en modo de espera. Para obtener más información acerca del servo encendido, consulte “Servo encendido”
- Configuración de fecha y hora: La fecha y la hora que se muestran en el teach pendant y el mensaje de registro en el robot siguen la configuración de fecha y hora del sistema, por lo cual es preciso configurar la fecha y hora en el arranque inicial. Para obtener más información acerca de cómo configurar la fecha y la hora, consulte “Configuración de fecha y hora”
- Utilizar la plataforma DART permite el control del robot sin el teach pendant.
- La plataforma DART presenta una pantalla que muestra al robot conectado a la red después del arranque y el proceso de controlar el número de serie del robot y conectarse al robot tiene lugar en esta pantalla.