
Instalación (CS-01P)
Precauciones durante la instalación
Precaución
- Asegúrese de que haya suficiente espacio para la instalación antes de instalar la controlador. Si no se asegura suficiente espacio, la Controlador puede dañarse, o puede haber un corto circuito en el robot o cable de teach pendant.
- Compruebe la fuente de alimentación de entrada al conectar la alimentación al producto. Si la fuente de alimentación de entrada conectada es diferente de la entrada de potencia nominal (100-240VAC 50/60Hz), es posible que el producto no funcione correctamente o que la controlador esté dañada.
Entorno de instalación
Cuando instale la controlador, tenga en cuenta lo siguiente.
- Asegúrese de que haya suficiente espacio para la instalación antes de instalar el controlador.
- La controlador debe estar fija.
Instalación de los accesorios
Instale el robot, la controlador y el teach pendant, los componentes clave del sistema, y suminístreles energía antes de operar el robot. La instalación de cada componente es la siguiente:
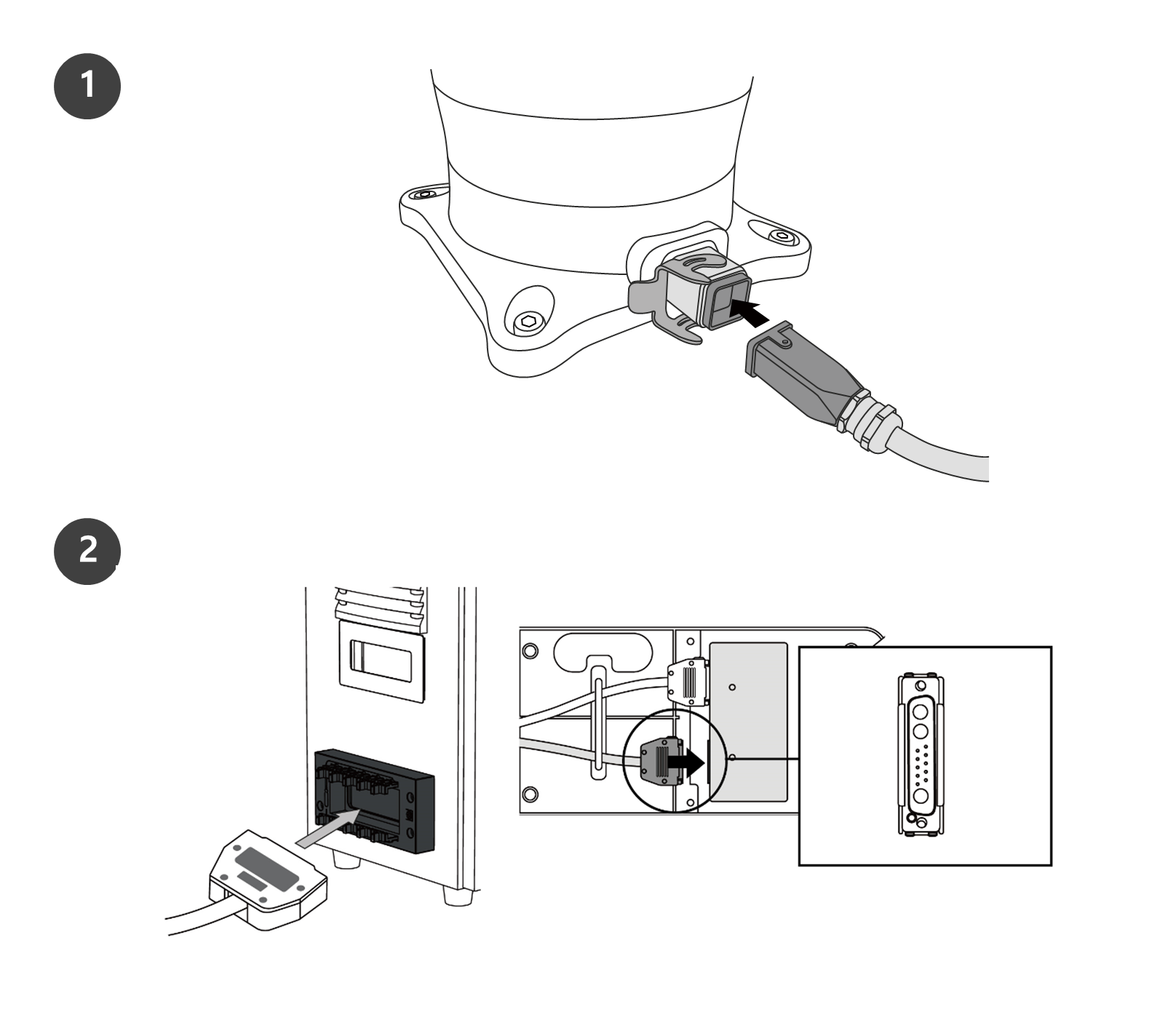
Conexión del manipulador a la controlador
| Descripción | |
|---|---|
| 1 | Colocación de un anillo de seguridad después de conectar el cable de conexión del manipulador
|
| 2 | Conexión del extremo opuesto del cable de conexión al controlador
|
Precaución
- No desconecte el cable del robot mientras esté encendido. El robot se puede dañar.
- No modifique ni extienda el cable del manipulador.
- Cuando instale la controlador, asegúrese de que queden al menos 50 mm de espacio a cada lado de la controlador para permitir la ventilación.
- Asegúrese de que los conectores estén correctamente conectados antes de encender la controlador.
Nota
- Al configurar el sistema, se recomienda instalar un amortiguador de ruido para evitar sus efectos nocivos y el mal funcionamiento del sistema.
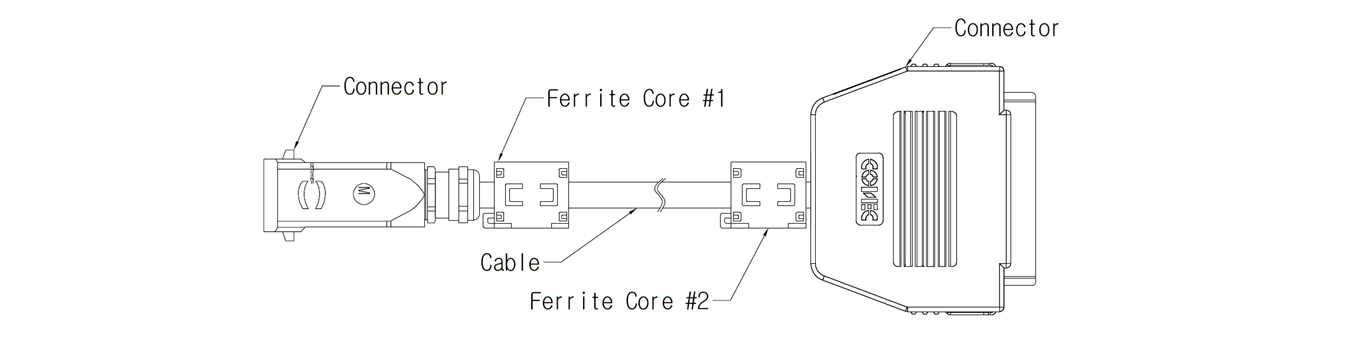
- Si el ruido generado por las ondas electromagnéticas influye en la controlador, es necesario instalar un núcleo de ferrita para garantizar un funcionamiento normal. La ubicación de la instalación es la siguiente:
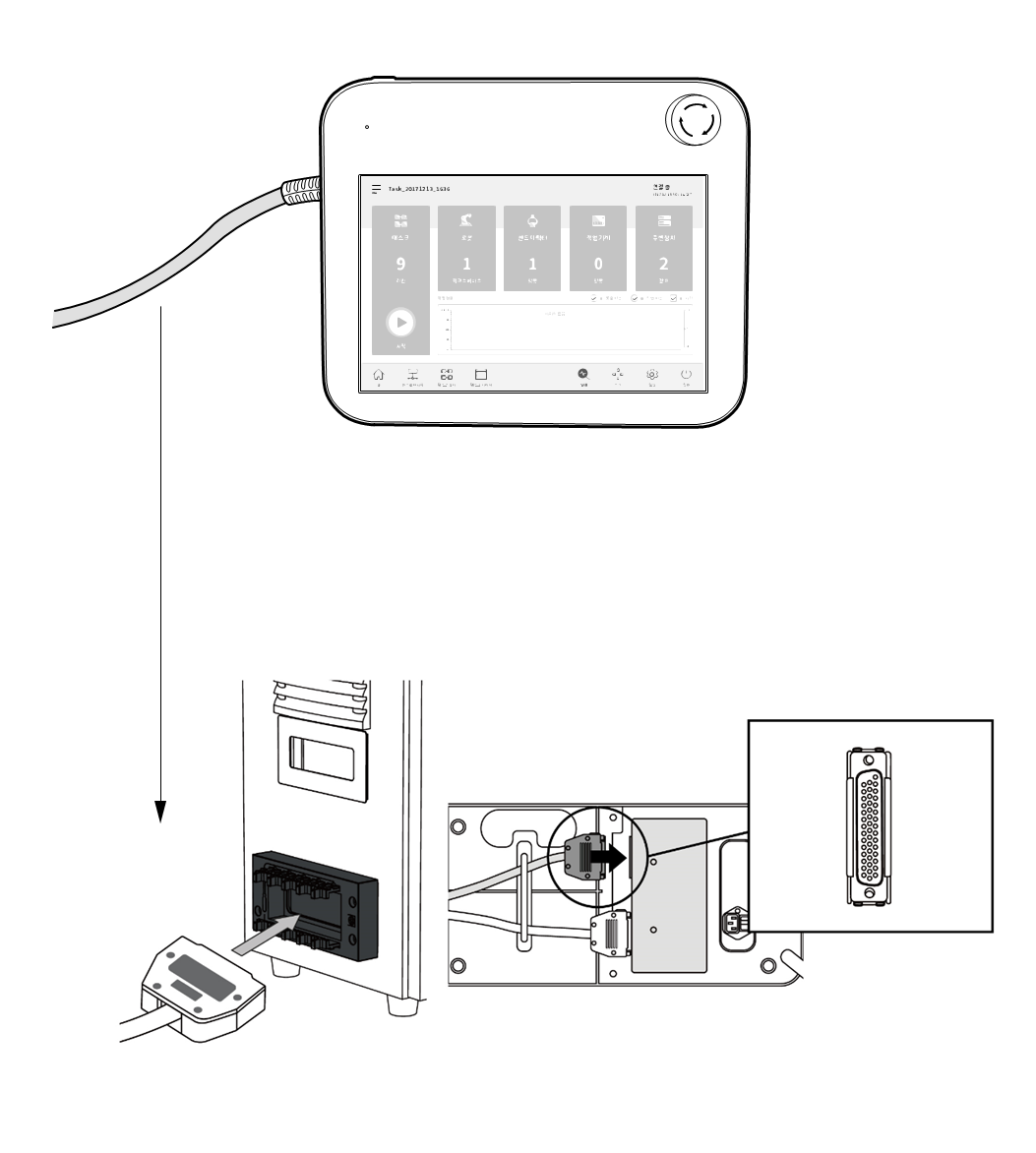
Conexión de la controlador y Teach Pendant
Empuje el cable del teach pendant en el conector de la controlador correspondiente hasta que escuche un clic para evitar que el cable se suelte.
Precaución
- Asegúrese de que los pines del extremo del cable no estén dañados o doblados antes de conectar el cable.
- Si el teach pendant se usa colgado en el AGV o en la controlador, tenga cuidado de no tropezar con los cables de conexión.
- Tenga cuidado de no dejar que la controlador, teach pendant o el cable entren en contacto con agua.
- No instale la controlador y teach pendant en un ambiente polvoriento o húmedo.
- La controlador y el teach pendant nunca deben exponerse a un entorno polvoriento. Tenga especial cuidado en entornos con polvo conductor.
Nota
- Al configurar el sistema, se recomienda instalar un amortiguador de ruido para evitar sus efectos nocivos y el mal funcionamiento del sistema.
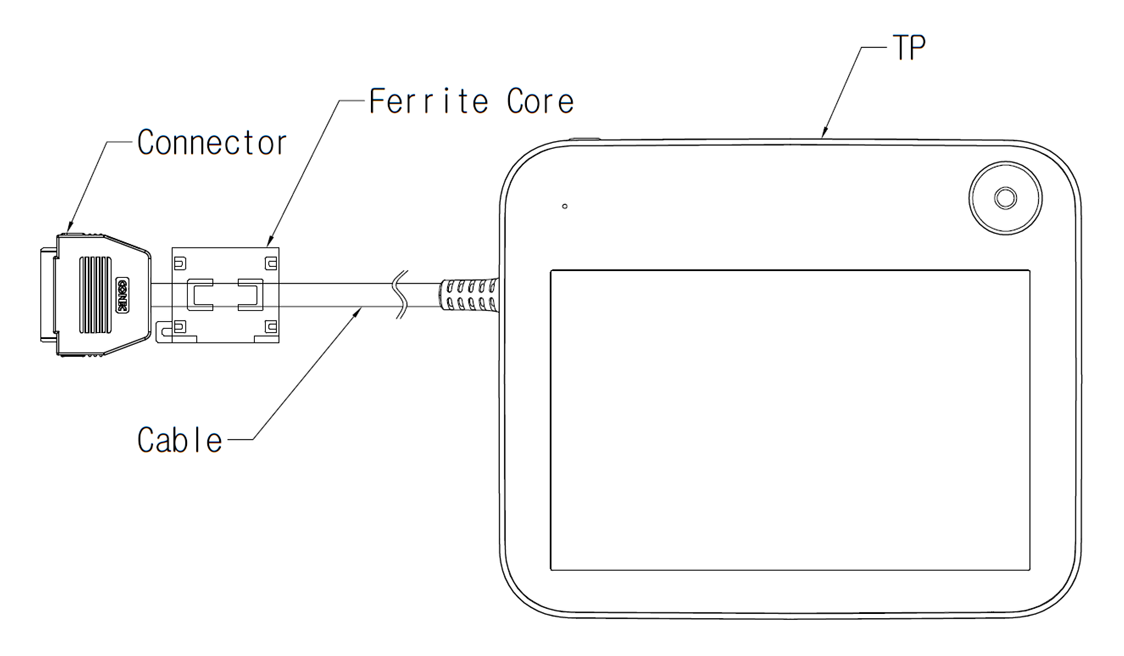
- Si el ruido generado por las ondas electromagnéticas influye en el teach pendant, es necesario instalar un núcleo de ferrita para garantizar un funcionamiento normal. La ubicación de la instalación es la siguiente:
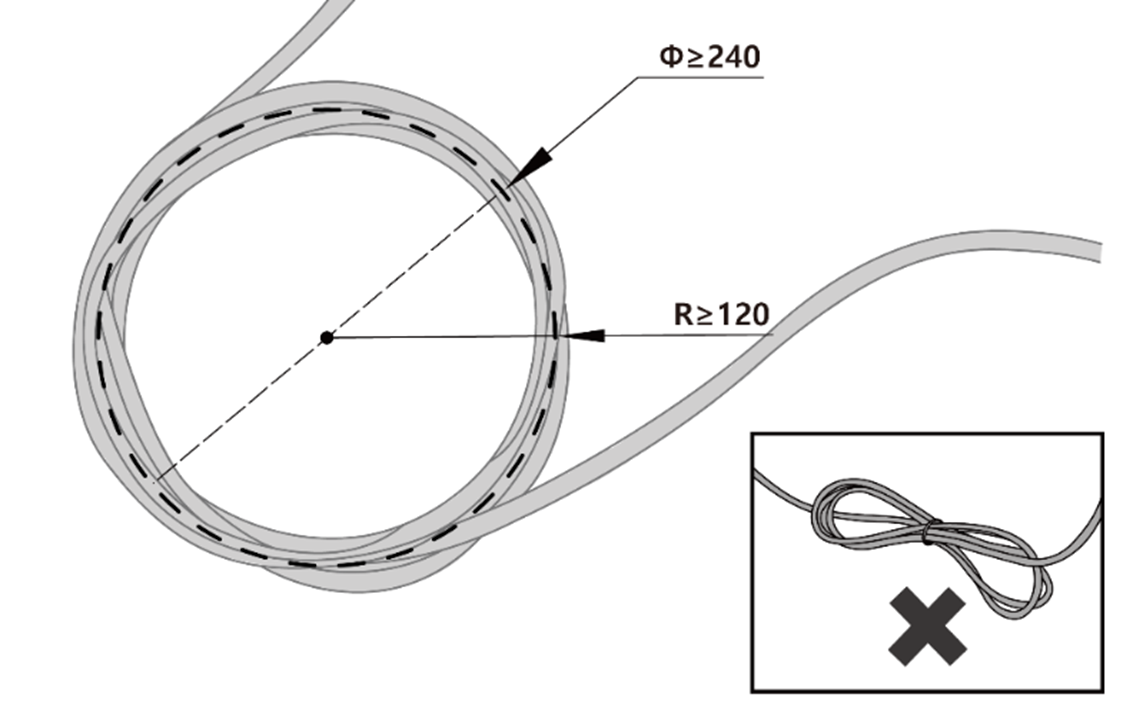
Enrutamiento de los cables del manipulador y del teach pendant
Asegúrese de que el radio de curvatura de los cables del manipulador y del teach pendant sea mayor que el radio de curvatura mínimo (120 mm).
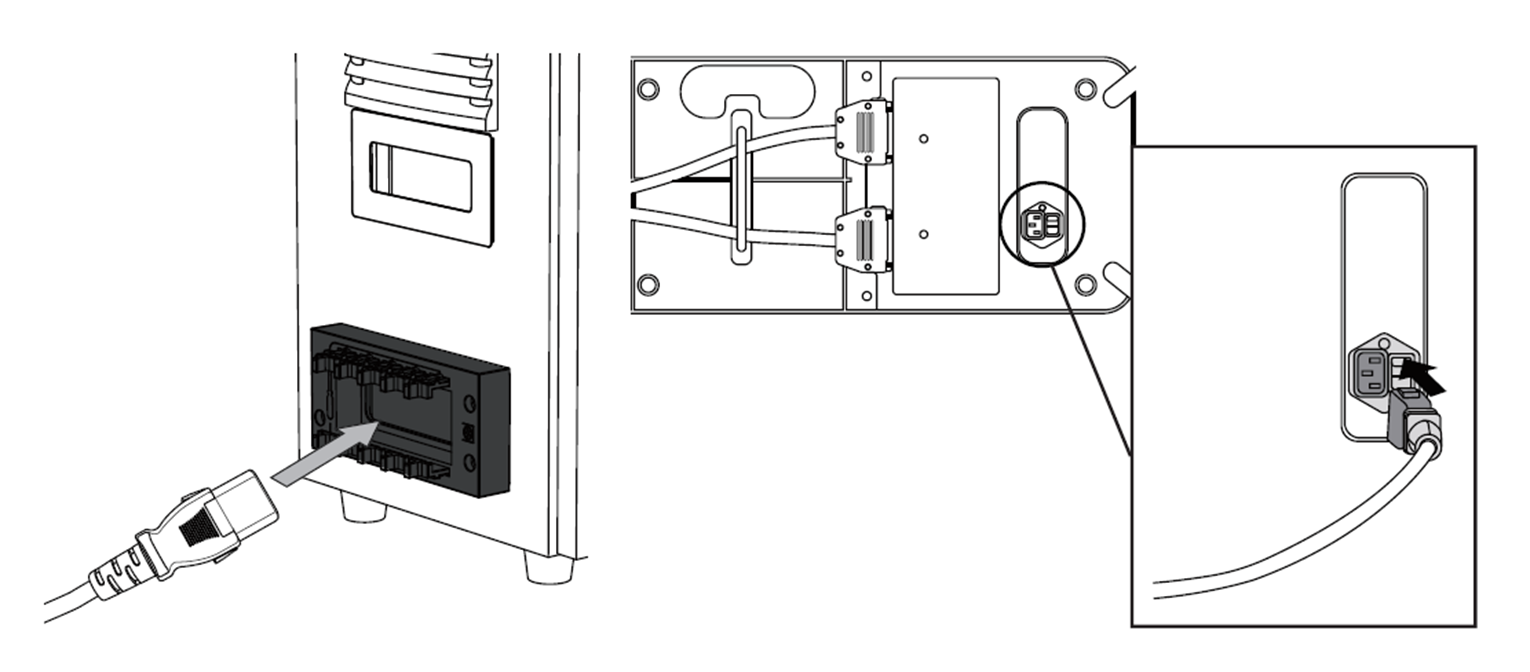
Suministro de energía a la controlador
Empuje el cable de energía en el conector de la controlador correspondiente hasta que escuche un clic para evitar que el cable se suelte.
Advertencia
- Después de conectar el cable de alimentación, asegúrese de que el robot ha establecido una conexión a tierra adecuada (conexión a tierra electrónica). Establezca una conexión a tierra común para todos los equipos del sistema con un perno no utilizado con el símbolo de conexión a tierra dentro de la controlador. El conductor de tierra debe cumplir con la clasificación de corriente máxima del sistema.
- Proteja la potencia de entrada de la controlador con dispositivos, como un disyuntor automático.
- No modifique ni extienda el cable del robot. Puede causar un incendio o una falla en la controlador.
- Asegúrese de que los cables estén correctamente conectados antes de suministrar energía a la controlador. Siempre use el cable original incluido en el paquete del producto.
- Tenga cuidado de no conectar la polaridad del voltaje de entrada de manera incorrecta.
Nota
- Al configurar el sistema, se recomienda instalar un interruptor de alimentación que pueda apagar todos los dispositivos del sistema a la vez.
- Si el voltaje de entrada es inferior a 195 V, el movimiento del robot puede verse limitado según la carga y la movilidad.
- La fuente de alimentación debe cumplir los requisitos mínimos, tales como conexión a tierra y disyuntores automáticos. Las especificaciones eléctricas son las siguientes: (Si seleccionó un controlador opcional, verifique las instrucciones en el apéndice)
Parámetro
Especificación
Input Voltage
100 – 240 VAC
Input Power Fuse (@100-240V)
15 A
Input Frequency
47 – 63 Hz