
Configuración de peso de la herramienta
Para configurar el peso de la herramienta del robot, toque el botón
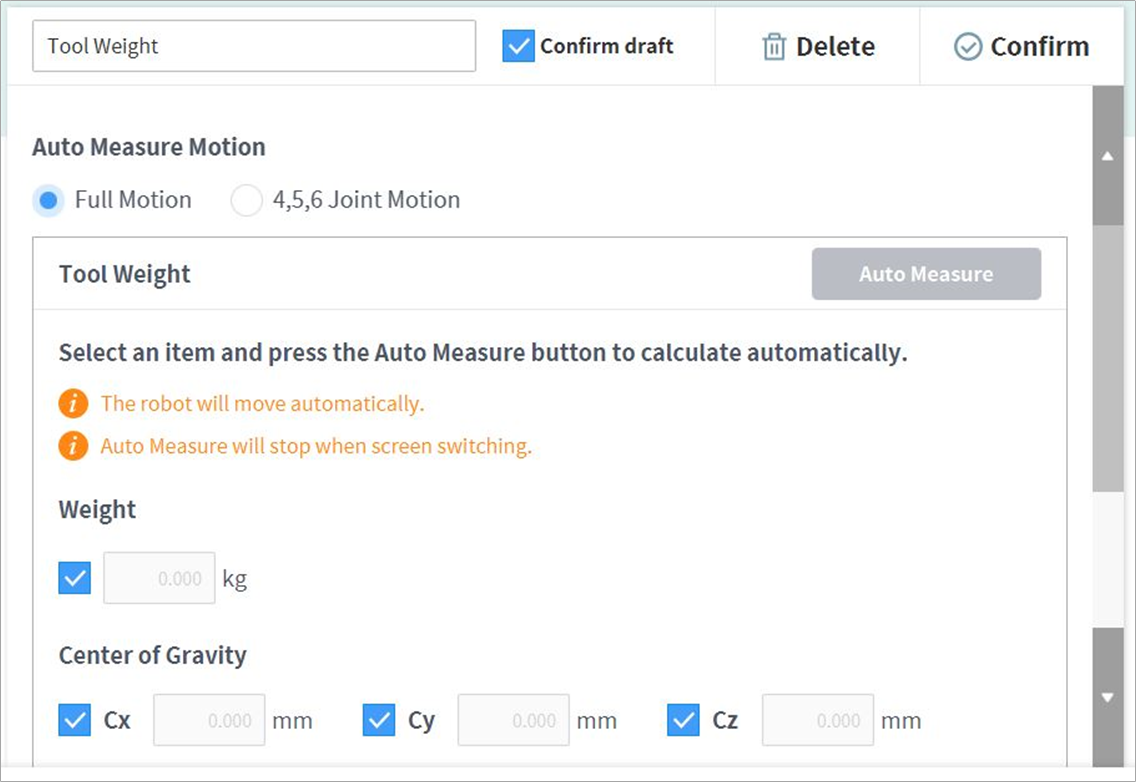
Medición automática del peso de la herramienta:
- Seleccione un método de cálculo de movimiento automático.
- Movimiento completo: Todas las articulaciones se utilizan para medir el peso de la herramienta.
- Movimiento 4, 5, 6: Las articulaciones 4, 5 y 6 se utilizan para medir el peso de la herramienta.
- Marque la casilla de verificación del parámetro (peso, centro de gravedad) que desea calcular.
- Es posible introducir un valor de parámetro conocido sin marcar la casilla de verificación.
- Si se introduce un parámetro conocido, los valores para los parámetros con las casillas de verificación marcadas permiten calcular el peso o la gravedad en función del valor de parámetro ingresado.
- Toque el botón Calcular automáticamente.
Advertencia
- Si está desmarcada la casilla de verificación para calcular automáticamente el peso, ingrese un número real positivo
(el centro de gravedad puede ser un número real negativo o 0). - Elimine todos los obstáculos antes de ejecutar el cálculo automático.
- Para ejecutar el cálculo automático de 4, 5 y 6, el ángulo de 3 ejes debe ser mayor de +30 grados o menor de -30 grados.
- Tenga en cuenta que las funciones de supervisión de seguridad están desactivadas durante el cálculo automático.
- Durante el cálculo automático, el botón Calcular automáticamente se convierte en el botón Detener, lo que permite que el usuario detenga el cálculo automático. Si el cálculo se detiene, los valores del peso y el centro de gravedad se restablecen.
Nota
Cuando se mide de forma automática el peso de la herramienta, existe un margen de error de ±0.5 kg (1.1 lb).